

ROBOTS DE EXTERIORES - Centro de Automática y Robótica
ROBOTS DE EXTERIORES - Centro de Automática y Robótica
ROBOTS DE EXTERIORES - Centro de Automática y Robótica

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
212 Robots <strong>de</strong> exteriores<br />
je. Estos anillos están hechos <strong>de</strong> polietileno <strong>de</strong> alta <strong>de</strong>nsidad y cada módulo<br />
tiene un ancho <strong>de</strong> 100mm. Para el mecanizado <strong>de</strong> cada anillo se utilizó<br />
una máquina <strong>de</strong> corte por inyección <strong>de</strong> agua a alta presión.<br />
Cada anillo se une por medio <strong>de</strong> unos espárragos en la parte central, y<br />
unos tornillos en cada extremo. Esta configuración pue<strong>de</strong> adaptarse para<br />
el caso en el que se <strong>de</strong>see alargar más la cabina para futuras modificaciones.<br />
Entre cada anillo, se ha colocado cuidadosamente cintas <strong>de</strong> teflón,<br />
para asegurar la estanqueidad <strong>de</strong> la cabina.<br />
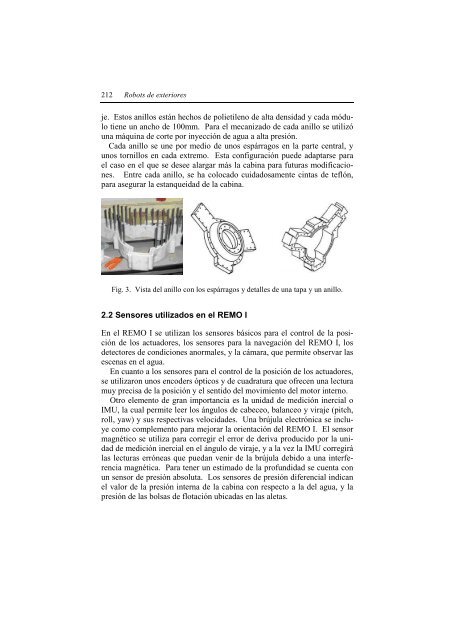
Fig. 3. Vista <strong>de</strong>l anillo con los espárragos y <strong>de</strong>talles <strong>de</strong> una tapa y un anillo.<br />
2.2 Sensores utilizados en el REMO I<br />
En el REMO I se utilizan los sensores básicos para el control <strong>de</strong> la posición<br />
<strong>de</strong> los actuadores, los sensores para la navegación <strong>de</strong>l REMO I, los<br />
<strong>de</strong>tectores <strong>de</strong> condiciones anormales, y la cámara, que permite observar las<br />
escenas en el agua.<br />
En cuanto a los sensores para el control <strong>de</strong> la posición <strong>de</strong> los actuadores,<br />
se utilizaron unos enco<strong>de</strong>rs ópticos y <strong>de</strong> cuadratura que ofrecen una lectura<br />
muy precisa <strong>de</strong> la posición y el sentido <strong>de</strong>l movimiento <strong>de</strong>l motor interno.<br />
Otro elemento <strong>de</strong> gran importancia es la unidad <strong>de</strong> medición inercial o<br />
IMU, la cual permite leer los ángulos <strong>de</strong> cabeceo, balanceo y viraje (pitch,<br />
roll, yaw) y sus respectivas velocida<strong>de</strong>s. Una brújula electrónica se incluye<br />
como complemento para mejorar la orientación <strong>de</strong>l REMO I. El sensor<br />
magnético se utiliza para corregir el error <strong>de</strong> <strong>de</strong>riva producido por la unidad<br />
<strong>de</strong> medición inercial en el ángulo <strong>de</strong> viraje, y a la vez la IMU corregirá<br />
las lecturas erróneas que puedan venir <strong>de</strong> la brújula <strong>de</strong>bido a una interferencia<br />
magnética. Para tener un estimado <strong>de</strong> la profundidad se cuenta con<br />
un sensor <strong>de</strong> presión absoluta. Los sensores <strong>de</strong> presión diferencial indican<br />
el valor <strong>de</strong> la presión interna <strong>de</strong> la cabina con respecto a la <strong>de</strong>l agua, y la<br />
presión <strong>de</strong> las bolsas <strong>de</strong> flotación ubicadas en las aletas.













