

ROBOTS DE EXTERIORES - Centro de Automática y Robótica
ROBOTS DE EXTERIORES - Centro de Automática y Robótica
ROBOTS DE EXTERIORES - Centro de Automática y Robótica

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
84 Robots <strong>de</strong> exteriores<br />
Roboclimber es un robot caminante y escalador cuadrúpedo financiado<br />
bajo un proyecto Growth/Craft <strong>de</strong> la Comisión Europea (2002-2004), <strong>de</strong>sarrollado<br />
para realizar operaciones remotas y automatizadas <strong>de</strong> monitorización<br />
y <strong>de</strong> perforación en montañas rocosas <strong>de</strong> difícil acceso, con el objeto<br />
<strong>de</strong> consolidar las la<strong>de</strong>ras y evitar <strong>de</strong>rrumbes, disminuyendo el riesgo que<br />
esto supone para distintas infraestructuras como carreteras, ferrocarriles o<br />
viviendas ubicadas al pie <strong>de</strong> las montañas.<br />
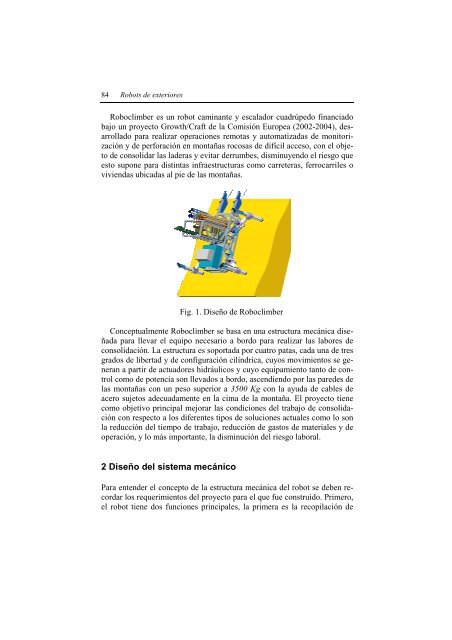
Fig. 1. Diseño <strong>de</strong> Roboclimber<br />
Conceptualmente Roboclimber se basa en una estructura mecánica diseñada<br />
para llevar el equipo necesario a bordo para realizar las labores <strong>de</strong><br />
consolidación. La estructura es soportada por cuatro patas, cada una <strong>de</strong> tres<br />
grados <strong>de</strong> libertad y <strong>de</strong> configuración cilíndrica, cuyos movimientos se generan<br />
a partir <strong>de</strong> actuadores hidráulicos y cuyo equipamiento tanto <strong>de</strong> control<br />
como <strong>de</strong> potencia son llevados a bordo, ascendiendo por las pare<strong>de</strong>s <strong>de</strong><br />
las montañas con un peso superior a 3500 Kg con la ayuda <strong>de</strong> cables <strong>de</strong><br />
acero sujetos a<strong>de</strong>cuadamente en la cima <strong>de</strong> la montaña. El proyecto tiene<br />
como objetivo principal mejorar las condiciones <strong>de</strong>l trabajo <strong>de</strong> consolidación<br />
con respecto a los diferentes tipos <strong>de</strong> soluciones actuales como lo son<br />
la reducción <strong>de</strong>l tiempo <strong>de</strong> trabajo, reducción <strong>de</strong> gastos <strong>de</strong> materiales y <strong>de</strong><br />
operación, y lo más importante, la disminución <strong>de</strong>l riesgo laboral.<br />
2 Diseño <strong>de</strong>l sistema mecánico<br />
Para enten<strong>de</strong>r el concepto <strong>de</strong> la estructura mecánica <strong>de</strong>l robot se <strong>de</strong>ben recordar<br />
los requerimientos <strong>de</strong>l proyecto para el que fue construido. Primero,<br />
el robot tiene dos funciones principales, la primera es la recopilación <strong>de</strong>













