

ROBOTS DE EXTERIORES - Centro de Automática y Robótica
ROBOTS DE EXTERIORES - Centro de Automática y Robótica
ROBOTS DE EXTERIORES - Centro de Automática y Robótica

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Robot <strong>de</strong> Gran<strong>de</strong>s Dimensiones para la Consolidación <strong>de</strong> La<strong>de</strong>ras <strong>de</strong> Montañas<br />
87<br />
ubicado en la parte lateral <strong>de</strong> la pata y conectado a su vez a la parte lateral<br />
correspondiente <strong>de</strong> la estructura.<br />
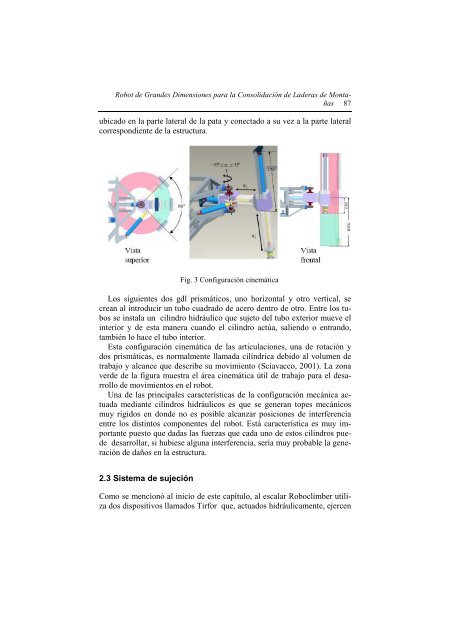
Fig. 3 Configuración cinemática<br />
Los siguientes dos gdl prismáticos, uno horizontal y otro vertical, se<br />
crean al introducir un tubo cuadrado <strong>de</strong> acero <strong>de</strong>ntro <strong>de</strong> otro. Entre los tubos<br />
se instala un cilindro hidráulico que sujeto <strong>de</strong>l tubo exterior mueve el<br />
interior y <strong>de</strong> esta manera cuando el cilindro actúa, saliendo o entrando,<br />
también lo hace el tubo interior.<br />
Esta configuración cinemática <strong>de</strong> las articulaciones, una <strong>de</strong> rotación y<br />
dos prismáticas, es normalmente llamada cilíndrica <strong>de</strong>bido al volumen <strong>de</strong><br />
trabajo y alcance que <strong>de</strong>scribe su movimiento (Sciavacco, 2001). La zona<br />
ver<strong>de</strong> <strong>de</strong> la figura muestra el área cinemática útil <strong>de</strong> trabajo para el <strong>de</strong>sarrollo<br />
<strong>de</strong> movimientos en el robot.<br />
Una <strong>de</strong> las principales características <strong>de</strong> la configuración mecánica actuada<br />
mediante cilindros hidráulicos es que se generan topes mecánicos<br />
muy rígidos en don<strong>de</strong> no es posible alcanzar posiciones <strong>de</strong> interferencia<br />
entre los distintos componentes <strong>de</strong>l robot. Está característica es muy importante<br />
puesto que dadas las fuerzas que cada uno <strong>de</strong> estos cilindros pue<strong>de</strong><br />
<strong>de</strong>sarrollar, si hubiese alguna interferencia, sería muy probable la generación<br />
<strong>de</strong> daños en la estructura.<br />
2.3 Sistema <strong>de</strong> sujeción<br />
Como se mencionó al inicio <strong>de</strong> este capítulo, al escalar Roboclimber utiliza<br />
dos dispositivos llamados Tirfor que, actuados hidráulicamente, ejercen













