

ROBOTS DE EXTERIORES - Centro de Automática y Robótica
ROBOTS DE EXTERIORES - Centro de Automática y Robótica
ROBOTS DE EXTERIORES - Centro de Automática y Robótica

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Una Nueva Metodología para Descripción <strong>de</strong>l Entorno en la Detección en Robots<br />
<strong>de</strong> Minas Antipersonas 165<br />
3.4 Mo<strong>de</strong>lado <strong>de</strong> los sistemas catadióptricos: hiperboloi<strong>de</strong>s<br />
Los sistemas hiperbólicos tienen sus inicios gracias a (Yamazawa, 1993),<br />
estos sistemas tienen dos puntos focales (Focus1, Focus2). El centro <strong>de</strong> la<br />
cámara está fijo a uno <strong>de</strong> los puntos focales. Un espejo hiperbólico, produce<br />
una imagen <strong>de</strong> un punto en el espacio sobre un plano vertical, a través<br />
<strong>de</strong>l punto P y su eje. De este modo, el punto P en (X, Y, Z) es proyectado<br />
sobre la imagen <strong>de</strong>l punto p en (x, y) (ver Fig.5), como indican la Ecuación<br />
(2):<br />
Y<br />
tan θ =<br />
(2)<br />
X<br />
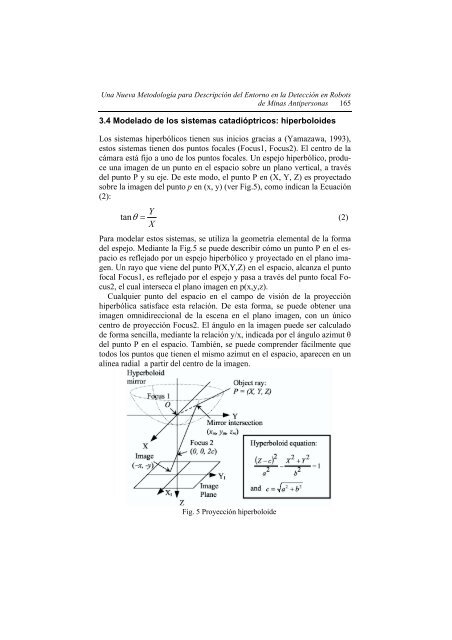
Para mo<strong>de</strong>lar estos sistemas, se utiliza la geometría elemental <strong>de</strong> la forma<br />
<strong>de</strong>l espejo. Mediante la Fig.5 se pue<strong>de</strong> <strong>de</strong>scribir cómo un punto P en el espacio<br />
es reflejado por un espejo hiperbólico y proyectado en el plano imagen.<br />
Un rayo que viene <strong>de</strong>l punto P(X,Y,Z) en el espacio, alcanza el punto<br />
focal Focus1, es reflejado por el espejo y pasa a través <strong>de</strong>l punto focal Focus2,<br />
el cual interseca el plano imagen en p(x,y,z).<br />
Cualquier punto <strong>de</strong>l espacio en el campo <strong>de</strong> visión <strong>de</strong> la proyección<br />
hiperbólica satisface esta relación. De esta forma, se pue<strong>de</strong> obtener una<br />
imagen omnidireccional <strong>de</strong> la escena en el plano imagen, con un único<br />
centro <strong>de</strong> proyección Focus2. El ángulo en la imagen pue<strong>de</strong> ser calculado<br />
<strong>de</strong> forma sencilla, mediante la relación y/x, indicada por el ángulo azimut θ<br />
<strong>de</strong>l punto P en el espacio. También, se pue<strong>de</strong> compren<strong>de</strong>r fácilmente que<br />
todos los puntos que tienen el mismo azimut en el espacio, aparecen en un<br />
alinea radial a partir <strong>de</strong>l centro <strong>de</strong> la imagen.<br />
Fig. 5 Proyección hiperboloi<strong>de</strong>













