

ROBOTS DE EXTERIORES - Centro de Automática y Robótica
ROBOTS DE EXTERIORES - Centro de Automática y Robótica
ROBOTS DE EXTERIORES - Centro de Automática y Robótica

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Sistemas <strong>de</strong> Localización y Percepción Inteligente en la Navegación Autónoma y<br />
Segura <strong>de</strong> Robots <strong>de</strong> Exteriores 191<br />
3 Integración <strong>de</strong> subsistemas sensoriales<br />
En ambos vehículos se ha integrado un conjunto idéntico <strong>de</strong> sensores para<br />
el posicionamiento global <strong>de</strong>l vehículo y para dotarle <strong>de</strong> la seguridad requerida<br />
en su interacción con un entorno dinámico semi-estructurado. Los<br />
sensores integrados pue<strong>de</strong>n dividirse en dos grupos: <strong>de</strong> localización y <strong>de</strong><br />
seguridad y reconocimiento <strong>de</strong>l entorno.<br />
3.1 Localización<br />
Para obtener la posición y orientación <strong>de</strong>l vehículo, se han incorporado un<br />
receptor GPS (Amstech 3100-LR12) con corrección diferencial Rasant y<br />
precisión nominal 1 m., una brújula digital (KVH-C100) con 0.5º <strong>de</strong> resolución,<br />
y un odómetro, <strong>de</strong> diseño propio, con una resolución nominal <strong>de</strong> 20<br />
cm, a fin <strong>de</strong> disponer <strong>de</strong> una localización global precisa y continua.<br />
3.2 Seguridad y percepción local<br />
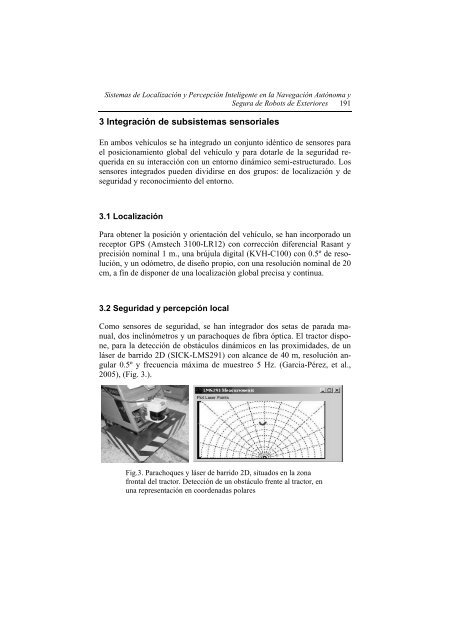
Como sensores <strong>de</strong> seguridad, se han integrador dos setas <strong>de</strong> parada manual,<br />
dos inclinómetros y un parachoques <strong>de</strong> fibra óptica. El tractor dispone,<br />
para la <strong>de</strong>tección <strong>de</strong> obstáculos dinámicos en las proximida<strong>de</strong>s, <strong>de</strong> un<br />
láser <strong>de</strong> barrido 2D (SICK-LMS291) con alcance <strong>de</strong> 40 m, resolución angular<br />
0.5º y frecuencia máxima <strong>de</strong> muestreo 5 Hz. (Garcia-Pérez, et al.,<br />
2005), (Fig. 3.).<br />
Fig.3. Parachoques y láser <strong>de</strong> barrido 2D, situados en la zona<br />
frontal <strong>de</strong>l tractor. Detección <strong>de</strong> un obstáculo frente al tractor, en<br />
una representación en coor<strong>de</strong>nadas polares













