Rexroth IndraDrive C Drive Controllers HCS02.1 ... - Bosch Rexroth
Rexroth IndraDrive C Drive Controllers HCS02.1 ... - Bosch Rexroth
Rexroth IndraDrive C Drive Controllers HCS02.1 ... - Bosch Rexroth

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
7-114 Commissioning and Parameterization <strong>Rexroth</strong> <strong>Indra<strong>Drive</strong></strong><br />
Profile Types<br />
Content of<br />
P-0-4084, Profile<br />
type<br />
Master<br />
communication<br />
Profile type: I/O mode positioning<br />
FF82h PROFIBUS,<br />
CANopen,<br />
DeviceNet<br />
Profile type: I/O mode preset velocity<br />
FF92h PROFIBUS,<br />
CANopen,<br />
DeviceNet<br />
Profile type: freely configurable mode<br />
FFFEh PROFIBUS,<br />
CANopen,<br />
DeviceNet<br />
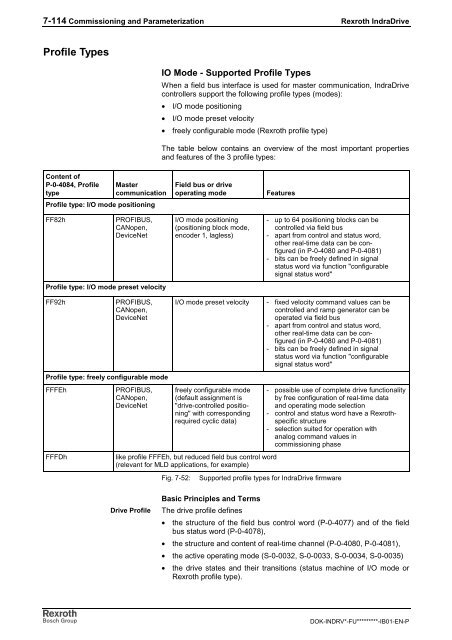
IO Mode - Supported Profile Types<br />
When a field bus interface is used for master communication, <strong>Indra<strong>Drive</strong></strong><br />
controllers support the following profile types (modes):<br />
• I/O mode positioning<br />
• I/O mode preset velocity<br />
• freely configurable mode (<strong>Rexroth</strong> profile type)<br />
The table below contains an overview of the most important properties<br />
and features of the 3 profile types:<br />
Field bus or drive<br />
operating mode Features<br />
I/O mode positioning<br />
(positioning block mode,<br />
encoder 1, lagless)<br />
- up to 64 positioning blocks can be<br />
controlled via field bus<br />
- apart from control and status word,<br />
other real-time data can be configured<br />
(in P-0-4080 and P-0-4081)<br />
- bits can be freely defined in signal<br />
status word via function "configurable<br />
signal status word"<br />
I/O mode preset velocity - fixed velocity command values can be<br />
controlled and ramp generator can be<br />
operated via field bus<br />
- apart from control and status word,<br />
other real-time data can be configured<br />
(in P-0-4080 and P-0-4081)<br />
- bits can be freely defined in signal<br />
status word via function "configurable<br />
signal status word"<br />
freely configurable mode<br />
(default assignment is<br />
"drive-controlled positioning"<br />
with corresponding<br />
required cyclic data)<br />
FFFDh like profile FFFEh, but reduced field bus control word<br />
(relevant for MLD applications, for example)<br />
<strong>Drive</strong> Profile<br />
- possible use of complete drive functionality<br />
by free configuration of real-time data<br />
and operating mode selection<br />
- control and status word have a <strong>Rexroth</strong>specific<br />
structure<br />
- selection suited for operation with<br />
analog command values in<br />
commissioning phase<br />
Fig. 7-52: Supported profile types for <strong>Indra<strong>Drive</strong></strong> firmware<br />
Basic Principles and Terms<br />
The drive profile defines<br />
• the structure of the field bus control word (P-0-4077) and of the field<br />
bus status word (P-0-4078),<br />
• the structure and content of real-time channel (P-0-4080, P-0-4081),<br />
• the active operating mode (S-0-0032, S-0-0033, S-0-0034, S-0-0035)<br />
• the drive states and their transitions (status machine of I/O mode or<br />
<strong>Rexroth</strong> profile type).<br />
DOK-INDRV*-FU*********-IB01-EN-P