

Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
90 4 <strong>Identifikation</strong> eines nichtlinearen Zwei-Massen-Systems<br />
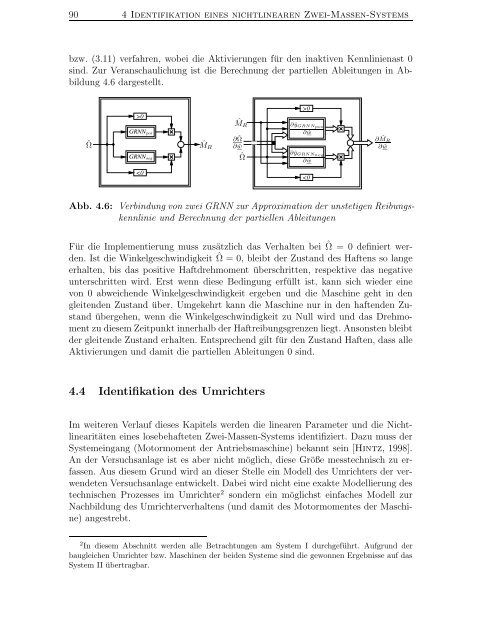
bzw. (3.11) verfahren, wobei die Aktivierungen für den inaktiven Kennlinienast 0<br />
sind. Zur Veranschaulichung ist die Berechnung der partiellen Ableitungen in Abbildung<br />
4.6 dargestellt.<br />
PSfrag replacements<br />
<strong>mit</strong><br />
ˆΩ<br />
>0<br />
GRNNpos<br />
GRNNneg<br />
0<br />
∂ ˆyGRNNpos<br />
∂ ˆw<br />
∂ ˆyGRNNneg<br />
∂ ˆw<br />
Abb. 4.6: Verbindung von zwei GRNN zur Approximation der unstetigen Reibungskennlinie<br />
und Berechnung der partiellen Ableitungen<br />
Für die Implementierung muss zusätzlich das Verhalten bei ˆ Ω = 0 definiert werden.<br />
Ist die Winkelgeschwindigkeit ˆ Ω = 0, bleibt der Zustand des Haftens so lange<br />
erhalten, bis das positive Haftdrehmoment überschritten, respektive das negative<br />
unterschritten wird. Erst wenn diese Bedingung erfüllt ist, kann sich wieder eine<br />
von 0 abweichende Winkelgeschwindigkeit ergeben und die Maschine geht in den<br />
gleitenden Zustand über. Umgekehrt kann die Maschine nur in den haftenden Zustand<br />
übergehen, wenn die Winkelgeschwindigkeit zu Null wird und das Drehmoment<br />
zu diesem Zeitpunkt innerhalb der Haftreibungsgrenzen liegt. Ansonsten bleibt<br />
der gleitende Zustand erhalten. Entsprechend gilt für den Zustand Haften, dass alle<br />
Aktivierungen und da<strong>mit</strong> die partiellen Ableitungen 0 sind.<br />
4.4 <strong>Identifikation</strong> des Umrichters<br />
Im weiteren Verlauf dieses Kapitels werden die linearen Parameter und die Nichtlinearitäten<br />
eines losebehafteten Zwei-Massen-Systems identifiziert. Dazu muss der<br />
<strong>Systeme</strong>ingang (Motormoment der Antriebsmaschine) bekannt sein [Hintz, 1998].<br />
An der Versuchsanlage ist es aber nicht möglich, diese Größe messtechnisch zu erfassen.<br />
Aus diesem Grund wird an dieser Stelle ein Modell des Umrichters der verwendeten<br />
Versuchsanlage entwickelt. Dabei wird nicht eine exakte Modellierung des<br />
technischen Prozesses im Umrichter 2 sondern ein möglichst einfaches Modell zur<br />
Nachbildung des Umrichterverhaltens (und da<strong>mit</strong> des Motormomentes der Maschine)<br />
angestrebt.<br />
2 In diesem Abschnitt werden alle Betrachtungen am System I durchgeführt. Aufgrund der<br />
baugleichen Umrichter bzw. Maschinen der beiden <strong>Systeme</strong> sind die gewonnen Ergebnisse auf das<br />
System II übertragbar.<br />













