

Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Reibmoment MR [Nm]<br />
ag replacements<br />
<strong>mit</strong><br />
140 5 <strong>Identifikation</strong> und Regelung einer Drosselklappe<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
−0.2<br />
−0.4<br />
−0.6<br />
Stützwerte<br />
gelernte Kennlinie<br />
−0.8<br />
−30 −20 −10 0 10 20 30<br />
Winkelgeschwindigkeit ˙ϕDK [ rad/s]<br />
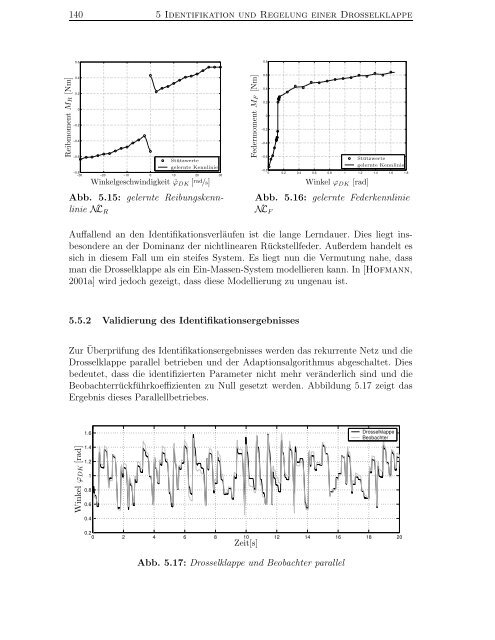
Abb. 5.15: gelernte Reibungskennlinie<br />
NLR<br />
Federmoment MF [Nm]<br />
PSfrag replacements<br />
<strong>mit</strong><br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
−0.2<br />
−0.4<br />
−0.6<br />
−0.8<br />
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8<br />
Winkel ϕDK [rad]<br />
Stützwerte<br />
gelernte Kennlinie<br />
Abb. 5.16: gelernte Federkennlinie<br />
Auffallend an den <strong>Identifikation</strong>sverläufen ist die lange Lerndauer. Dies liegt insbesondere<br />
an der Dominanz der nichtlinearen Rückstellfeder. Außerdem handelt es<br />
sich in diesem Fall um ein steifes System. Es liegt nun die Vermutung nahe, dass<br />
man die Drosselklappe als ein Ein-Massen-System modellieren kann. In [Hofmann,<br />
2001a] wird jedoch gezeigt, dass diese Modellierung zu ungenau ist.<br />
NLF<br />
5.5.2 Validierung des <strong>Identifikation</strong>sergebnisses<br />
Zur Überprüfung des <strong>Identifikation</strong>sergebnisses werden das rekurrente Netz und die<br />
Drosselklappe parallel betrieben und der Adaptionsalgorithmus abgeschaltet. Dies<br />
bedeutet, dass die identifizierten Parameter nicht mehr veränderlich sind und die<br />
Beobachterrückführkoeffizienten zu Null gesetzt werden. Abbildung 5.17 zeigt das<br />
Ergebnis dieses Parallellbetriebes.<br />
Winkel ϕDK [rad]<br />
1.6<br />
1.4<br />
1.2<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
Drosselklappe<br />
Beobachter<br />
0.2<br />
0 2 4 6 8 10 12 14 16 18 20<br />
Zeit[s]<br />
PSfrag replacements<br />
<strong>mit</strong><br />
Abb. 5.17: Drosselklappe und Beobachter parallel<br />
Winkel ϕDK [rad]













