

Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
4.5 <strong>Identifikation</strong> des losefreien Zwei-Massen-Systems 107<br />
PSfrag replacements<br />
<strong>mit</strong><br />
<br />
<br />
rad<br />
s<br />
Winkelgeschwindigkeit ΩI<br />
15<br />
10<br />
5<br />
0<br />
−5<br />
−10<br />
−15<br />
−20<br />
ˆΩI<br />
ΩI<br />
1580 1580.5 1581 1581.5 1582<br />
Zeit [s]<br />
1582.5 1583 1583.5 1584<br />
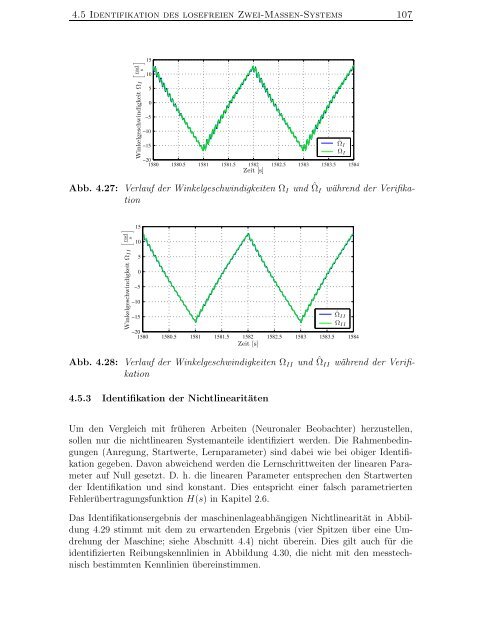
Abb. 4.27: Verlauf der Winkelgeschwindigkeiten ΩI und ˆ ΩI während der Verifikation<br />
<br />
PSfrag replacements<br />
<strong>mit</strong><br />
<br />
rad<br />
s<br />
Winkelgeschwindigkeit ΩII<br />
15<br />
10<br />
5<br />
0<br />
−5<br />
−10<br />
−15<br />
−20<br />
ˆΩII<br />
ΩII<br />
1580 1580.5 1581 1581.5 1582<br />
Zeit [s]<br />
1582.5 1583 1583.5 1584<br />
Abb. 4.28: Verlauf der Winkelgeschwindigkeiten ΩII und ˆ ΩII während der Verifikation<br />
4.5.3 <strong>Identifikation</strong> der Nichtlinearitäten<br />
Um den Vergleich <strong>mit</strong> früheren Arbeiten (Neuronaler Beobachter) herzustellen,<br />
sollen nur die nichtlinearen Systemanteile identifiziert werden. Die Rahmenbedingungen<br />
(Anregung, Startwerte, Lernparameter) sind dabei wie bei obiger <strong>Identifikation</strong><br />
gegeben. Davon abweichend werden die Lernschrittweiten der linearen Parameter<br />
auf Null gesetzt. D. h. die linearen Parameter entsprechen den Startwerten<br />
der <strong>Identifikation</strong> und sind konstant. Dies entspricht einer falsch parametrierten<br />
Fehlerübertragungsfunktion H(s) in Kapitel 2.6.<br />
Das <strong>Identifikation</strong>sergebnis der maschinenlageabhängigen Nichtlinearität in Abbildung<br />
4.29 stimmt <strong>mit</strong> dem zu erwartenden Ergebnis (vier Spitzen über eine Umdrehung<br />
der Maschine; siehe Abschnitt 4.4) nicht überein. Dies gilt auch für die<br />
identifizierten Reibungskennlinien in Abbildung 4.30, die nicht <strong>mit</strong> den messtechnisch<br />
bestimmten Kennlinien übereinstimmen.













