

Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
136 5 <strong>Identifikation</strong> und Regelung einer Drosselklappe<br />
I ∗ A<br />
GNM & Ansteuerung 1<br />
Getriebe Klappe 1<br />
1 TA<br />
J1 1<br />
c J2<br />
1<br />
MM<br />
IA ∼ MM<br />
˙ϕM ϕM ˙ϕDK ϕDK<br />
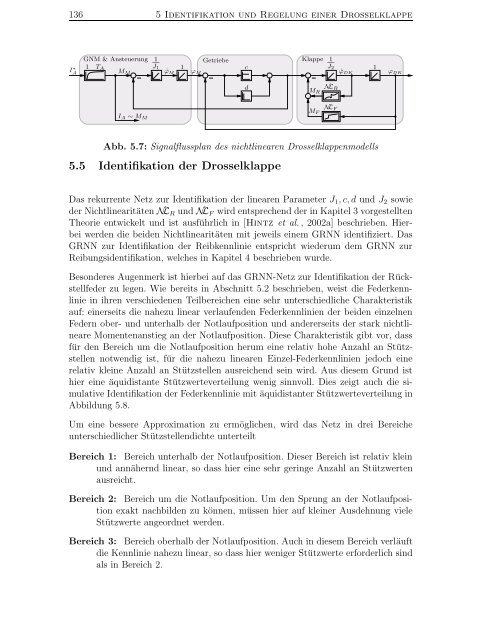
Abb. 5.7: Signalflussplan des nichtlinearen Drosselklappenmodells<br />
5.5 <strong>Identifikation</strong> der Drosselklappe<br />
Das rekurrente Netz zur <strong>Identifikation</strong> der linearen Parameter J1, c, d und J2 sowie<br />
der Nichtlinearitäten NLR und NLF wird entsprechend der in Kapitel 3 vorgestellten<br />
Theorie entwickelt und ist ausführlich in [Hintz et al. , 2002a] beschrieben. Hierbei<br />
werden die beiden Nichtlinearitäten <strong>mit</strong> jeweils einem GRNN identifiziert. Das<br />
GRNN zur <strong>Identifikation</strong> der Reibkennlinie entspricht wiederum dem GRNN zur<br />
Reibungsidentifikation, welches in Kapitel 4 beschrieben wurde.<br />
Besonderes Augenmerk ist hierbei auf das GRNN-Netz zur <strong>Identifikation</strong> der Rückstellfeder<br />
zu legen. Wie bereits in Abschnitt 5.2 beschrieben, weist die Federkennlinie<br />
in ihren verschiedenen Teilbereichen eine sehr unterschiedliche Charakteristik<br />
auf: einerseits die nahezu linear verlaufenden Federkennlinien der beiden einzelnen<br />
Federn ober- und unterhalb der Notlaufposition und andererseits der stark nichtlineare<br />
Momentenanstieg an der Notlaufposition. Diese Charakteristik gibt vor, dass<br />
für den Bereich um die Notlaufposition herum eine relativ hohe Anzahl an Stützstellen<br />
notwendig ist, für die nahezu linearen Einzel-Federkennlinien jedoch eine<br />
relativ kleine Anzahl an Stützstellen ausreichend sein wird. Aus diesem Grund ist<br />
hier eine äquidistante Stützwerteverteilung wenig sinnvoll. Dies zeigt auch die simulative<br />
<strong>Identifikation</strong> der Federkennlinie <strong>mit</strong> äquidistanter Stützwerteverteilung in<br />
Abbildung 5.8.<br />
Um eine bessere Approximation zu ermöglichen, wird das Netz in drei Bereiche<br />
unterschiedlicher Stützstellendichte unterteilt<br />
Bereich 1: Bereich unterhalb der Notlaufposition. Dieser Bereich ist relativ klein<br />
und annähernd linear, so dass hier eine sehr geringe Anzahl an Stützwerten<br />
ausreicht.<br />
Bereich 2: Bereich um die Notlaufposition. Um den Sprung an der Notlaufposition<br />
exakt nachbilden zu können, müssen hier auf kleiner Ausdehnung viele<br />
Stützwerte angeordnet werden.<br />
Bereich 3: Bereich oberhalb der Notlaufposition. Auch in diesem Bereich verläuft<br />
die Kennlinie nahezu linear, so dass hier weniger Stützwerte erforderlich sind<br />
als in Bereich 2.<br />
d<br />
MR<br />
MF<br />
NLR<br />
NLF













