

Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
106 4 <strong>Identifikation</strong> eines nichtlinearen Zwei-Massen-Systems<br />
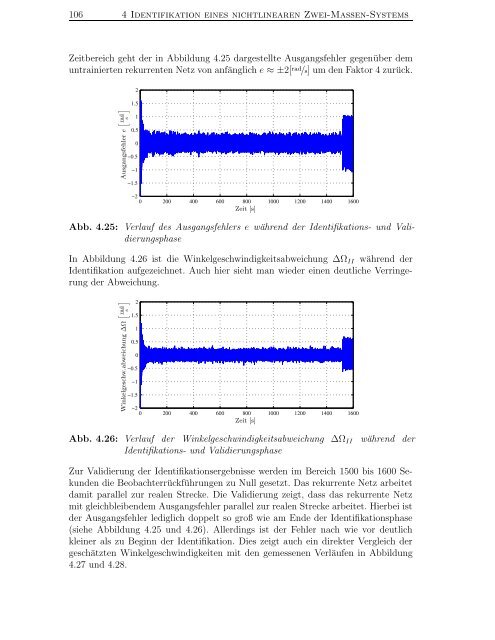
Zeitbereich geht der in Abbildung 4.25 dargestellte Ausgangsfehler gegenüber dem<br />
untrainierten rekurrenten Netz von anfänglich e ≈ ±2[ rad/s] um den Faktor 4 zurück.<br />
<br />
<br />
rad<br />
s<br />
PSfrag replacements<br />
<strong>mit</strong><br />
Ausgangsfehler e<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
−0.5<br />
−1<br />
−1.5<br />
−2<br />
0 200 400 600 800<br />
Zeit [s]<br />
1000 1200 1400 1600<br />
Abb. 4.25: Verlauf des Ausgangsfehlers e während der <strong>Identifikation</strong>s- und Validierungsphase<br />
In Abbildung 4.26 ist die Winkelgeschwindigkeitsabweichung ∆ΩII während der<br />
<strong>Identifikation</strong> aufgezeichnet. Auch hier sieht man wieder einen deutliche Verringerung<br />
der Abweichung.<br />
<br />
<br />
rad<br />
s<br />
PSfrag replacements<br />
<strong>mit</strong><br />
Winkelgeschw.abweichung ∆Ω<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
−0.5<br />
−1<br />
−1.5<br />
−2<br />
0 200 400 600 800<br />
Zeit [s]<br />
1000 1200 1400 1600<br />
Abb. 4.26: Verlauf der Winkelgeschwindigkeitsabweichung ∆ΩII während der<br />
<strong>Identifikation</strong>s- und Validierungsphase<br />
Zur Validierung der <strong>Identifikation</strong>sergebnisse werden im Bereich 1500 bis 1600 Sekunden<br />
die Beobachterrückführungen zu Null gesetzt. Das rekurrente Netz arbeitet<br />
da<strong>mit</strong> parallel zur realen Strecke. Die Validierung zeigt, dass das rekurrente Netz<br />
<strong>mit</strong> gleichbleibendem Ausgangsfehler parallel zur realen Strecke arbeitet. Hierbei ist<br />
der Ausgangsfehler lediglich doppelt so groß wie am Ende der <strong>Identifikation</strong>sphase<br />
(siehe Abbildung 4.25 und 4.26). Allerdings ist der Fehler nach wie vor deutlich<br />
kleiner als zu Beginn der <strong>Identifikation</strong>. Dies zeigt auch ein direkter Vergleich der<br />
geschätzten Winkelgeschwindigkeiten <strong>mit</strong> den gemessenen Verläufen in Abbildung<br />
4.27 und 4.28.













