

Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
4.4 <strong>Identifikation</strong> des Umrichters 97<br />
messtechnisch bestimmten Kennlinie überein.<br />
Wie in Kapitel 4.3 beschrieben wird zur Approximation der Unstetigkeit bei der<br />
Winkelgeschwindigkeit Ω = 0 jeweils ein GRNN für den positiven Ast und ein<br />
GRNN für den negativen Ast der Reibungskennlinie verwendet. Aufgrund der Extrapolationsverhalten<br />
der beiden GRNN wirkt sich an der Unstetigkeitsstelle der hohe<br />
Wert von σnorm = 1.6 besonders deutlich aus. Dies erklärt die Differenz zwischen<br />
der approximierten Kennlinie und den zugehörigen Stützstellen.<br />
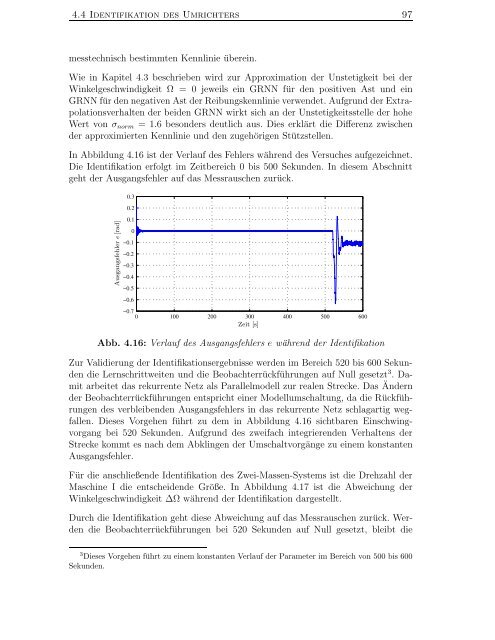
In Abbildung 4.16 ist der Verlauf des Fehlers während des Versuches aufgezeichnet.<br />
Die <strong>Identifikation</strong> erfolgt im Zeitbereich 0 bis 500 Sekunden. In diesem Abschnitt<br />
geht der Ausgangsfehler auf das Messrauschen zurück.<br />
PSfrag replacements<br />
<strong>mit</strong><br />
Ausgangsfehler e [rad]<br />
0.3<br />
0.2<br />
0.1<br />
0<br />
−0.1<br />
−0.2<br />
−0.3<br />
−0.4<br />
−0.5<br />
−0.6<br />
−0.7<br />
0 100 200 300<br />
Zeit [s]<br />
400 500 600<br />
Abb. 4.16: Verlauf des Ausgangsfehlers e während der <strong>Identifikation</strong><br />
Zur Validierung der <strong>Identifikation</strong>sergebnisse werden im Bereich 520 bis 600 Sekunden<br />
die Lernschrittweiten und die Beobachterrückführungen auf Null gesetzt 3 . Da<strong>mit</strong><br />
arbeitet das rekurrente Netz als Parallelmodell zur realen Strecke. Das Ändern<br />
der Beobachterrückführungen entspricht einer Modellumschaltung, da die Rückführungen<br />
des verbleibenden Ausgangsfehlers in das rekurrente Netz schlagartig wegfallen.<br />
Dieses Vorgehen führt zu dem in Abbildung 4.16 sichtbaren Einschwingvorgang<br />
bei 520 Sekunden. Aufgrund des zweifach integrierenden Verhaltens der<br />
Strecke kommt es nach dem Abklingen der Umschaltvorgänge zu einem konstanten<br />
Ausgangsfehler.<br />
Für die anschließende <strong>Identifikation</strong> des Zwei-Massen-Systems ist die Drehzahl der<br />
Maschine I die entscheidende Größe. In Abbildung 4.17 ist die Abweichung der<br />
Winkelgeschwindigkeit ∆Ω während der <strong>Identifikation</strong> dargestellt.<br />
Durch die <strong>Identifikation</strong> geht diese Abweichung auf das Messrauschen zurück. Werden<br />
die Beobachterrückführungen bei 520 Sekunden auf Null gesetzt, bleibt die<br />
3 Dieses Vorgehen führt zu einem konstanten Verlauf der Parameter im Bereich von 500 bis 600<br />
Sekunden.













