

Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Federmoment MF [Nm]<br />
ag replacements<br />
<strong>mit</strong><br />
5.5 <strong>Identifikation</strong> der Drosselklappe 141<br />
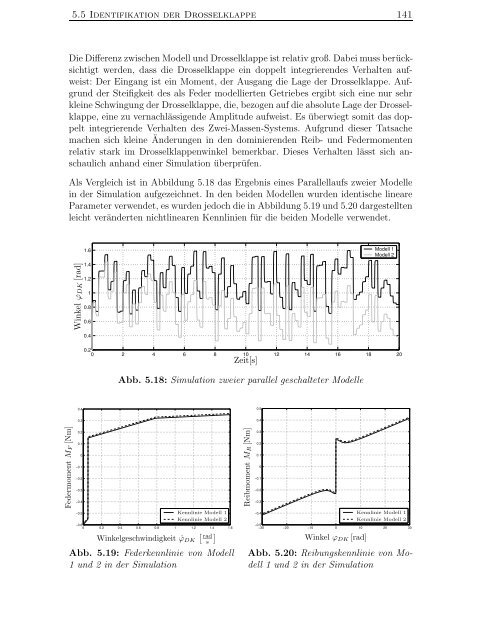
Die Differenz zwischen Modell und Drosselklappe ist relativ groß. Dabei muss berücksichtigt<br />
werden, dass die Drosselklappe ein doppelt integrierendes Verhalten aufweist:<br />
Der Eingang ist ein Moment, der Ausgang die Lage der Drosselklappe. Aufgrund<br />
der Steifigkeit des als Feder modellierten Getriebes ergibt sich eine nur sehr<br />
kleine Schwingung der Drosselklappe, die, bezogen auf die absolute Lage der Drosselklappe,<br />
eine zu vernachlässigende Amplitude aufweist. Es überwiegt so<strong>mit</strong> das doppelt<br />
integrierende Verhalten des Zwei-Massen-Systems. Aufgrund dieser Tatsache<br />
machen sich kleine Änderungen in den dominierenden Reib- und Federmomenten<br />
relativ stark im Drosselklappenwinkel bemerkbar. Dieses Verhalten lässt sich anschaulich<br />
anhand einer Simulation überprüfen.<br />
Als Vergleich ist in Abbildung 5.18 das Ergebnis eines Parallellaufs zweier Modelle<br />
in der Simulation aufgezeichnet. In den beiden Modellen wurden identische lineare<br />
Parameter verwendet, es wurden jedoch die in Abbildung 5.19 und 5.20 dargestellten<br />
leicht veränderten nichtlinearen Kennlinien für die beiden Modelle verwendet.<br />
Winkel ϕDK [rad]<br />
0.4<br />
0.3<br />
0.2<br />
0.1<br />
0<br />
−0.1<br />
−0.2<br />
−0.3<br />
−0.4<br />
−0.5<br />
1.6<br />
1.4<br />
1.2<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
Modell 1<br />
Modell 2<br />
0.2<br />
0 2 4 6 8 10 12 14 16 18 20<br />
Zeit[s]<br />
PSfrag replacements<br />
<strong>mit</strong><br />
Winkel ϕDK [rad]<br />
Abb. 5.18: Simulation zweier parallel geschalteter Modelle<br />
−0.6<br />
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6<br />
Winkelgeschwindigkeit ˙ϕDK<br />
Kennlinie Modell 1<br />
Kennlinie Modell 2<br />
rad<br />
s<br />
Abb. 5.19: Federkennlinie von Modell<br />
1 und 2 in der Simulation<br />
<br />
Reibmoment MR [Nm]<br />
PSfrag replacements<br />
<strong>mit</strong><br />
0.5<br />
0.4<br />
0.3<br />
0.2<br />
0.1<br />
0<br />
−0.1<br />
−0.2<br />
−0.3<br />
−0.4<br />
Kennlinie Modell 1<br />
Kennlinie Modell 2<br />
−0.5<br />
−30 −20 −10 0 10 20 30<br />
Winkel ϕDK [rad]<br />
Abb. 5.20: Reibungskennlinie von Modell<br />
1 und 2 in der Simulation













