

Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
ag replacements<br />
<strong>mit</strong><br />
148 5 <strong>Identifikation</strong> und Regelung einer Drosselklappe<br />
Drosselklappenwinkel ϕDK[rad]<br />
1.15<br />
1.1<br />
1.05<br />
1<br />
0.95<br />
0.9<br />
1.05 1.1 1.15 1.2 1.25 1.3<br />
Zeit [s]<br />
PI-Zustandsregler<br />
Sollwert<br />
PID-Regler<br />
PSfrag replacements<br />
Abb. 5.31: Vergleich PID-Regler <strong>mit</strong><br />
KP = 5, KD = 0.12 und PI-<br />
Zustandsregler<br />
<strong>mit</strong><br />
Drosselklappenwinkel ϕDK[rad]<br />
1.15<br />
1.1<br />
1.05<br />
1<br />
0.95<br />
0.9<br />
1.05 1.1 1.15 1.2 1.25 1.3<br />
Zeit [s]<br />
PI-Zustandsregler<br />
Sollwert<br />
PID-Regler<br />
Abb. 5.32: Vergleich PID-Regler <strong>mit</strong><br />
KP = 50, KD = 0.6 und PI-<br />
Zustandsregler<br />
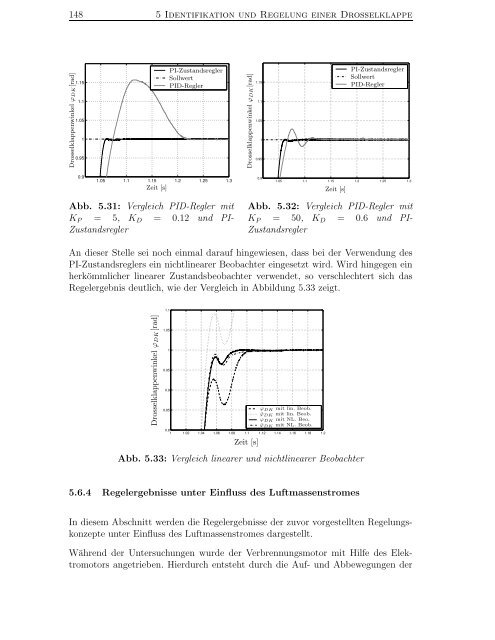
An dieser Stelle sei noch einmal darauf hingewiesen, dass bei der Verwendung des<br />
PI-Zustandsreglers ein <strong>nichtlinearer</strong> Beobachter eingesetzt wird. Wird hingegen ein<br />
herkömmlicher linearer Zustandsbeobachter verwendet, so verschlechtert sich das<br />
Regelergebnis deutlich, wie der Vergleich in Abbildung 5.33 zeigt.<br />
Drosselklappenwinkel ϕDK[rad]<br />
PSfrag replacements<br />
<strong>mit</strong><br />
1.1<br />
1.05<br />
1<br />
0.95<br />
0.9<br />
0.85<br />
ϕDK <strong>mit</strong> lin. Beob.<br />
ˆϕ DK <strong>mit</strong> lin. Beob.<br />
ϕDK <strong>mit</strong> NL. Beo.<br />
ˆϕ DK <strong>mit</strong> NL. Beob.<br />
0.8<br />
1 1.02 1.04 1.06 1.08 1.1 1.12 1.14 1.16 1.18 1.2<br />
Zeit [s]<br />
Abb. 5.33: Vergleich linearer und <strong>nichtlinearer</strong> Beobachter<br />
5.6.4 Regelergebnisse unter Einfluss des Luftmassenstromes<br />
In diesem Abschnitt werden die Regelergebnisse der zuvor vorgestellten Regelungskonzepte<br />
unter Einfluss des Luftmassenstromes dargestellt.<br />
Während der Untersuchungen wurde der Verbrennungsmotor <strong>mit</strong> Hilfe des Elektromotors<br />
angetrieben. Hierdurch entsteht durch die Auf- und Abbewegungen der













