

Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
PSfrag replacements<br />
122 4 <strong>Identifikation</strong> eines nichtlinearen Zwei-Massen-Systems<br />
<strong>mit</strong><br />
PSfrag replacements<br />
Reibmomente MRI und MRII [Nm]<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
−0.2<br />
identifiziert(Maschine I)<br />
gemessen(Maschine I)<br />
−0.4<br />
identifiziert(Maschine II)<br />
gemessen(Maschine II)<br />
−0.6<br />
Stützwerte (Maschine I)<br />
Stützwerte (Maschine II)<br />
−0.8<br />
−20 −15 −10 −5 0 5 10<br />
15 20<br />
Winkelgeschwindigkeit Ω rad<br />
s<br />
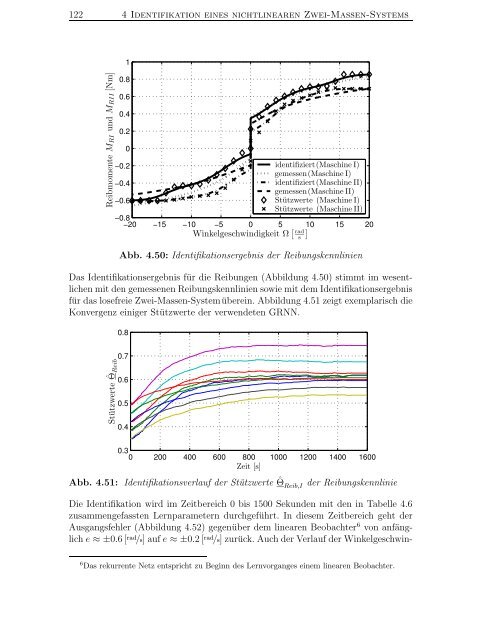
Abb. 4.50: <strong>Identifikation</strong>sergebnis der Reibungskennlinien<br />
Das <strong>Identifikation</strong>sergebnis für die Reibungen (Abbildung 4.50) stimmt im wesentlichen<br />
<strong>mit</strong> den gemessenen Reibungskennlinien sowie <strong>mit</strong> dem <strong>Identifikation</strong>sergebnis<br />
für das losefreie Zwei-Massen-Systemüberein. Abbildung 4.51 zeigt exemplarisch die<br />
Konvergenz einiger Stützwerte der verwendeten GRNN.<br />
<strong>mit</strong><br />
Stützwerte ˆ Θ Reib<br />
0.8<br />
0.7<br />
0.6<br />
0.5<br />
0.4<br />
0.3<br />
0 200 400 600 800<br />
Zeit [s]<br />
1000 1200 1400 1600<br />
Abb. 4.51: <strong>Identifikation</strong>sverlauf der Stützwerte ˆ Θ Reib,I der Reibungskennlinie<br />
Die <strong>Identifikation</strong> wird im Zeitbereich 0 bis 1500 Sekunden <strong>mit</strong> den in Tabelle 4.6<br />
zusammengefassten Lernparametern durchgeführt. In diesem Zeitbereich geht der<br />
Ausgangsfehler (Abbildung 4.52) gegenüber dem linearen Beobachter 6 von anfänglich<br />
e ≈ ±0.6 [ rad/s] auf e ≈ ±0.2 [ rad/s] zurück. Auch der Verlauf der Winkelgeschwin-<br />
6 Das rekurrente Netz entspricht zu Beginn des Lernvorganges einem linearen Beobachter.













