

Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
126 4 <strong>Identifikation</strong> eines nichtlinearen Zwei-Massen-Systems<br />
<br />
PSfrag replacements<br />
<strong>mit</strong><br />
PSfrag replacements<br />
<strong>mit</strong><br />
Federkonstante ĉ Nm<br />
rad<br />
1400<br />
1350<br />
1300<br />
1250<br />
1200<br />
1150<br />
0 200 400 600 800 1000 1200 1400 1600<br />
Zeit [s]<br />
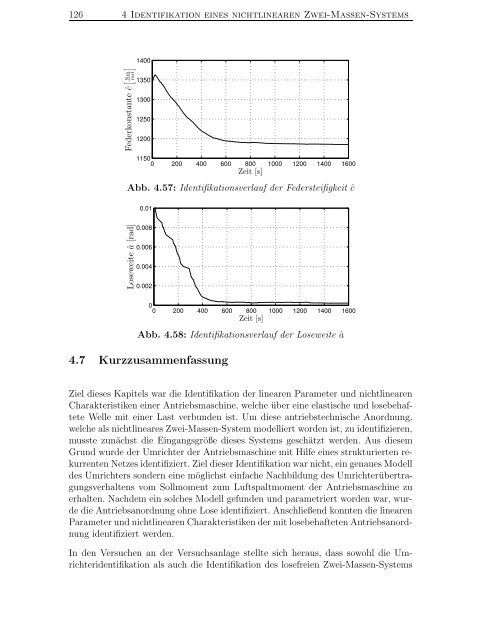
Abb. 4.57: <strong>Identifikation</strong>sverlauf der Federsteifigkeit ĉ<br />
Loseweite â [rad]<br />
0.01<br />
0.008<br />
0.006<br />
0.004<br />
0.002<br />
0<br />
0 200 400 600 800 1000 1200 1400 1600<br />
Zeit [s]<br />
Abb. 4.58: <strong>Identifikation</strong>sverlauf der Loseweite â<br />
4.7 Kurzzusammenfassung<br />
Ziel dieses Kapitels war die <strong>Identifikation</strong> der linearen Parameter und nichtlinearen<br />
Charakteristiken einer Antriebsmaschine, welche über eine elastische und losebehaftete<br />
Welle <strong>mit</strong> einer Last verbunden ist. Um diese antriebstechnische Anordnung,<br />
welche als nichtlineares Zwei-Massen-System modelliert worden ist, zu identifizieren,<br />
musste zunächst die Eingangsgröße dieses Systems geschätzt werden. Aus diesem<br />
Grund wurde der Umrichter der Antriebsmaschine <strong>mit</strong> Hilfe eines strukturierten rekurrenten<br />
Netzes identifiziert. Ziel dieser <strong>Identifikation</strong> war nicht, ein genaues Modell<br />
des Umrichters sondern eine möglichst einfache Nachbildung des Umrichterübertragungsverhaltens<br />
vom Sollmoment zum Luftspaltmoment der Antriebsmaschine zu<br />
erhalten. Nachdem ein solches Modell gefunden und parametriert worden war, wurde<br />
die Antriebsanordnung ohne Lose identifiziert. Anschließend konnten die linearen<br />
Parameter und nichtlinearen Charakteristiken der <strong>mit</strong> losebehafteten Antriebsanordnung<br />
identifiziert werden.<br />
In den Versuchen an der Versuchsanlage stellte sich heraus, dass sowohl die Umrichteridentifikation<br />
als auch die <strong>Identifikation</strong> des losefreien Zwei-Massen-Systems













