

Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
6.3 Das Hammerstein-Modell im rekurrenten Netz 173<br />
<strong>mit</strong> den linearen Parametern ˆ Ψ1 = 1<br />
ˆTA,I<br />
, ˆ Ψ2 = 1<br />
ˆJges<br />
dem Stützwertevektor für die statische Nichtlinearität ˆ Θ NL.<br />
, ˆ Ψ3 = 1 ˆ T und ˆ Ψ4 = 1<br />
ˆTA,II<br />
sowie<br />
Die zeitdiskrete Zustandsbeschreibung des rekurrenten Netzes und die Berechnung<br />
der Gradienten und der Jacobi-Matrix sind in Anhang F.2 skizziert. Um die <strong>Identifikation</strong>sergebnisse<br />
<strong>mit</strong>einander vergleichen zu können, werden wie in Abschnitt 6.3.2<br />
nur die ersten beiden Zustände zurückgeführt. Das Lerngesetz ergibt sich wiederum<br />
aus Gleichung (3.3).<br />
Die folgende <strong>Identifikation</strong> erfolgte im Zeitbereich 0 bis 1100 Sekunden. Anschließend<br />
wurden sowohl die Lernschrittweiten als auch die Beobachterrückführungen zu Null<br />
gesetzt, um das rekurrente Netz für die Validierung des <strong>Identifikation</strong>sergebnisses<br />
als Parallelmodell zur vorgegebenen Strecke zu verwenden.<br />
Alle für die <strong>Identifikation</strong> relevanten Parameter und Ergebnisse sind in Tabelle 6.2<br />
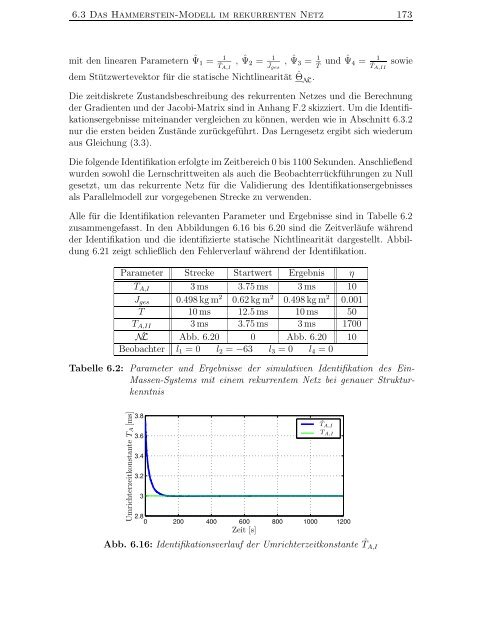
zusammengefasst. In den Abbildungen 6.16 bis 6.20 sind die Zeitverläufe während<br />
der <strong>Identifikation</strong> und die identifizierte statische Nichtlinearität dargestellt. Abbildung<br />
6.21 zeigt schließlich den Fehlerverlauf während der <strong>Identifikation</strong>.<br />
Parameter Strecke Startwert Ergebnis η<br />
TA,I 3 ms 3.75 ms 3 ms 10<br />
Jges 0.498 kg m 2 0.62 kg m 2 0.498 kg m 2 0.001<br />
T 10 ms 12.5 ms 10 ms 50<br />
TA,II 3 ms 3.75 ms 3 ms 1700<br />
NL Abb. 6.20 0 Abb. 6.20 10<br />
Beobachter l1 = 0 l2 = −63 l3 = 0 l4 = 0<br />
Tabelle 6.2: Parameter und Ergebnisse der simulativen <strong>Identifikation</strong> des Ein-<br />
Massen-Systems <strong>mit</strong> einem rekurrentem Netz bei genauer Strukturkenntnis<br />
PSfrag replacements<br />
<strong>mit</strong><br />
Umrichterzeitkonstante TA [ms]<br />
3.8<br />
3.6<br />
3.4<br />
3.2<br />
3<br />
2.8<br />
0 200 400 600 800 1000 1200<br />
Zeit [s]<br />
Abb. 6.16: <strong>Identifikation</strong>sverlauf der Umrichterzeitkonstante ˆ TA,I<br />
ˆTA,I<br />
TA,I













