

Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
ag replacements<br />
<strong>mit</strong><br />
198 B Beispiel Anwendung<br />
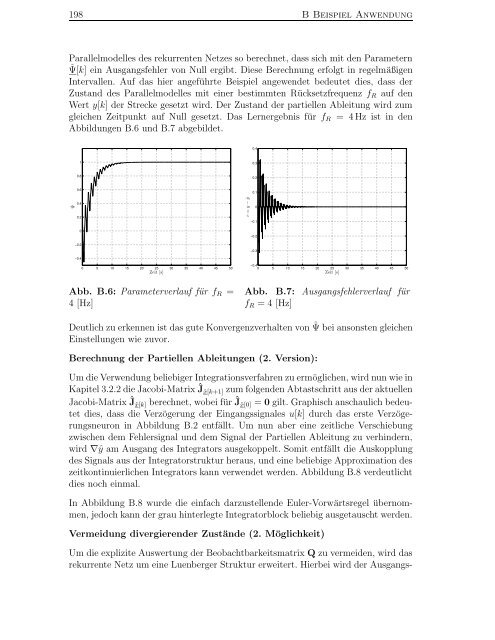
Parallelmodelles des rekurrenten Netzes so berechnet, dass sich <strong>mit</strong> den Parametern<br />
ˆΨ[k] ein Ausgangsfehler von Null ergibt. Diese Berechnung erfolgt in regelmäßigen<br />
Intervallen. Auf das hier angeführte Beispiel angewendet bedeutet dies, dass der<br />
Zustand des Parallelmodelles <strong>mit</strong> einer bestimmten Rücksetzfrequenz fR auf den<br />
Wert y[k] der Strecke gesetzt wird. Der Zustand der partiellen Ableitung wird zum<br />
gleichen Zeitpunkt auf Null gesetzt. Das Lernergebnis für fR = 4 Hz ist in den<br />
Abbildungen B.6 und B.7 abgebildet.<br />
ˆΨ<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
−0.2<br />
−0.4<br />
PSfrag replacements<br />
0 5 10 15 20 25 30 35 40 45 50<br />
Zeit [s]<br />
Abb. B.6: Parameterverlauf für fR =<br />
4 [Hz]<br />
<strong>mit</strong><br />
e = y − ˆy<br />
0.4<br />
0.3<br />
0.2<br />
0.1<br />
0<br />
−0.1<br />
−0.2<br />
−0.3<br />
−0.4<br />
0 5 10 15 20 25<br />
Zeit [s]<br />
30 35 40 45 50<br />
Abb. B.7: Ausgangsfehlerverlauf für<br />
fR = 4 [Hz]<br />
Deutlich zu erkennen ist das gute Konvergenzverhalten von ˆ Ψ bei ansonsten gleichen<br />
Einstellungen wie zuvor.<br />
Berechnung der Partiellen Ableitungen (2. Version):<br />
Um die Verwendung beliebiger Integrationsverfahren zu ermöglichen, wird nun wie in<br />
Kapitel 3.2.2 die Jacobi-Matrix ˆJˆx[k+1] zum folgenden Abtastschritt aus der aktuellen<br />
Jacobi-Matrix ˆJˆx[k] berechnet, wobei für ˆJˆx[0] = 0 gilt. Graphisch anschaulich bedeutet<br />
dies, dass die Verzögerung der Eingangssignales u[k] durch das erste Verzögerungsneuron<br />
in Abbildung B.2 entfällt. Um nun aber eine zeitliche Verschiebung<br />
zwischen dem Fehlersignal und dem Signal der Partiellen Ableitung zu verhindern,<br />
wird ∇ˆy am Ausgang des Integrators ausgekoppelt. So<strong>mit</strong> entfällt die Auskopplung<br />
des Signals aus der Integratorstruktur heraus, und eine beliebige Approximation des<br />
zeitkontinuierlichen Integrators kann verwendet werden. Abbildung B.8 verdeutlicht<br />
dies noch einmal.<br />
In Abbildung B.8 wurde die einfach darzustellende Euler-Vorwärtsregel übernommen,<br />
jedoch kann der grau hinterlegte Integratorblock beliebig ausgetauscht werden.<br />
Vermeidung divergierender Zustände (2. Möglichkeit)<br />
Um die explizite Auswertung der Beobachtbarkeitsmatrix Q zu vermeiden, wird das<br />
rekurrente Netz um eine Luenberger Struktur erweitert. Hierbei wird der Ausgangs-













