

Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
180 6 <strong>Identifikation</strong> von dynamischen Nichtlinearitäten<br />
muss die zweifache Abtastzeit kleiner oder gleich der kleinsten Zeitkonstante sein.<br />
Für gute Abtastergebnisse wird sogar eine Abtastzeit zehn mal kleiner als die kleinste<br />
Zeitkonstante empfohlen. Da hier nicht einmal das Shannonsche Theorem eingehalten<br />
werden kann, ist eine sehr ungenaue <strong>Identifikation</strong> der Zeitkonstante zu erwarten.<br />
Alle für die <strong>Identifikation</strong> relevanten Parameter und Ergebnisse sind in Tabelle 6.4<br />
zusammengefasst. In den Abbildungen 6.29 bis 6.32 sind die Zeitverläufe während<br />
der <strong>Identifikation</strong> und die identifizierte statische Nichtlinearität dargestellt. Abbildung<br />
6.32 zeigt schließlich den Fehlerverlauf während der <strong>Identifikation</strong>.<br />
Parameter Erwartungswert Startwert Ergebnis<br />
TA,I 3 ms 3.75 ms 5.62 ms<br />
Jges 0.498 kg m 2 0.62 kg m 2 0.496 kg m 2<br />
NL Abb. 6.31 0 Abb. 6.31<br />
Beobachter l1 = 0 l2 = −63<br />
Hammerstein m = 60 mr = 6 r = 22 ¯σ = 2 ζ = 13<br />
Tabelle 6.4: Parameter und Ergebnisse der <strong>Identifikation</strong> an der Versuchsanlage<br />
An der realen Anlage sind alle gemessenen Signale <strong>mit</strong> Messrauschen überlagert.<br />
Ebenfalls ist zu beachten, dass die Anfangszustände der Anlage und des rekurrenten<br />
Netzes unterschiedlich sind, und deshalb ein Einschwingen des Beobachters<br />
stattfindet. Im Zeitraum bis 1100 s findet das Lernen der Parameter statt. Um<br />
das <strong>Identifikation</strong>sergebnis zu validieren, wird das Lernen ab 1100 s abgeschaltet<br />
und die Beobachterrückführungen l deaktiviert. Das rekurrente Netz läuft da<strong>mit</strong> als<br />
Parallelmodell zur Anlage.<br />
PSfrag replacements<br />
<strong>mit</strong><br />
Umrichterzeitkonstante TA [ms]<br />
5.8<br />
5.6<br />
5.4<br />
5.2<br />
5<br />
4.8<br />
4.6<br />
4.4<br />
4.2<br />
0 200 400 600<br />
Zeit [s]<br />
800 1000 1200<br />
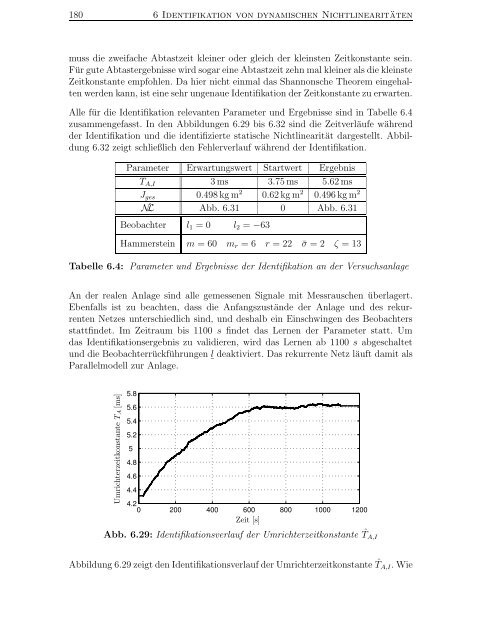
Abb. 6.29: <strong>Identifikation</strong>sverlauf der Umrichterzeitkonstante ˆ TA,I<br />
Abbildung 6.29 zeigt den <strong>Identifikation</strong>sverlauf der Umrichterzeitkonstante ˆ TA,I. Wie













