

Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...
Identifikation nichtlinearer mechatronischer Systeme mit ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
124 4 <strong>Identifikation</strong> eines nichtlinearen Zwei-Massen-Systems<br />
teten Zwei-Massen-System der Ausgangsfehler nicht so deutlich verbessert werden<br />
wie beim losefreien Zwei-Massen-System.<br />
Zur Validierung der <strong>Identifikation</strong>sergebnisse werden im Bereich 1500 bis 1600 Sekunden<br />
die Beobachterrückführungen zu Null gesetzt. Zusätzlich werden die Lernschrittweiten<br />
η ebenfalls zu Null gesetzt, um eine weitere Adaption des Parametervektors<br />
ˆw zu verhindern. Das rekurrente Netz stellt in dieser Konfiguration ein<br />
Parallelmodell der Strecke dar. Die Validierung zeigt, dass das rekurrente Netz <strong>mit</strong><br />
gleichbleibendem Ausgangsfehler parallel zur realen Strecke arbeitet. Allerdings ist<br />
dieser Fehler deutlich größer als das Messrauschen (siehe Abbildungen 4.25 und<br />
4.26). Die Ursachen dafür liegen zum einen an der ungenauen Losemodellierung und<br />
zum anderen an der numerischen Differentiation, ohne die die Lose nicht berücksichtigt<br />
werden kann. Wie den Abbildungen 4.25 und 4.26 zu entnehmen ist, ist<br />
der Fehler in der Validierungsphase größer als zu Beginn der <strong>Identifikation</strong>sphase.<br />
Hierbei ist allerdings zu berücksichtigen, dass während der <strong>Identifikation</strong>sphase<br />
die Beobachterrückführungen aktiv sind. Vergleicht man das untrainierte Netz <strong>mit</strong><br />
der realen Anlage in der Validierungskonfiguration so würde der Ausgangsfehler auf<br />
Grund des global integrierenden Verhaltens gegen Unendlich streben.<br />
<br />
PSfrag replacements<br />
<strong>mit</strong><br />
<br />
rad<br />
s<br />
Winkelgeschwindigkeit ΩI<br />
20<br />
10<br />
0<br />
−10<br />
−20<br />
1580 1580.5 1581 1581.5 1582<br />
Zeit [s]<br />
1582.5 1583 1583.5 1584<br />
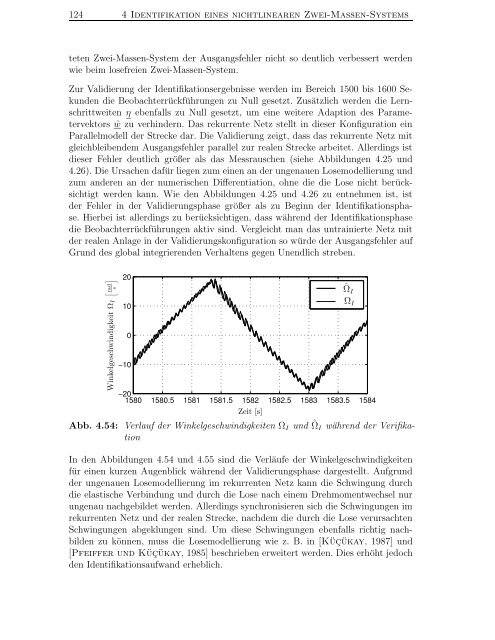
Abb. 4.54: Verlauf der Winkelgeschwindigkeiten ΩI und ˆ ΩI während der Verifikation<br />
In den Abbildungen 4.54 und 4.55 sind die Verläufe der Winkelgeschwindigkeiten<br />
für einen kurzen Augenblick während der Validierungsphase dargestellt. Aufgrund<br />
der ungenauen Losemodellierung im rekurrenten Netz kann die Schwingung durch<br />
die elastische Verbindung und durch die Lose nach einem Drehmomentwechsel nur<br />
ungenau nachgebildet werden. Allerdings synchronisieren sich die Schwingungen im<br />
rekurrenten Netz und der realen Strecke, nachdem die durch die Lose verursachten<br />
Schwingungen abgeklungen sind. Um diese Schwingungen ebenfalls richtig nachbilden<br />
zu können, muss die Losemodellierung wie z. B. in [Küçükay, 1987] und<br />
[Pfeiffer und Küçükay, 1985] beschrieben erweitert werden. Dies erhöht jedoch<br />
den <strong>Identifikation</strong>saufwand erheblich.<br />
ˆΩI<br />
ΩI













