

Lineare Algebra - SAM - ETH Zürich
Lineare Algebra - SAM - ETH Zürich
Lineare Algebra - SAM - ETH Zürich

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Kapitel 6 — Vektorräume mit Skalarprodukt <strong>Lineare</strong> <strong>Algebra</strong> (2007)<br />
Hier ist zu erwähnen, dass die unitären bzw. orthogonalen Matrizen<br />
der Ordnung n eine Gruppe bilden.<br />
Beispiel 6.10:<br />
Drehung des Koordinatensystems in R 2 . Hier gilt<br />
b ′ 1 = cos φ b 1 + sin φ b 2 ,<br />
b ′ 2 = − sin φ b 1 + cos φ b 2 ,<br />
wobei beim gängigen Koordinatensystem b 1 = e 1 und b 2 = e 2 die<br />
Standardbasisvektoren sind. Also hat man, mit der zweidimensionalen<br />
Givens–Rotationsmatrix U(φ) aus Kapitel 2,<br />
( )<br />
cos φ − sin φ<br />
T =<br />
= U(−φ) , B = I , B ′ = U(−φ) .<br />
sin φ cos φ<br />
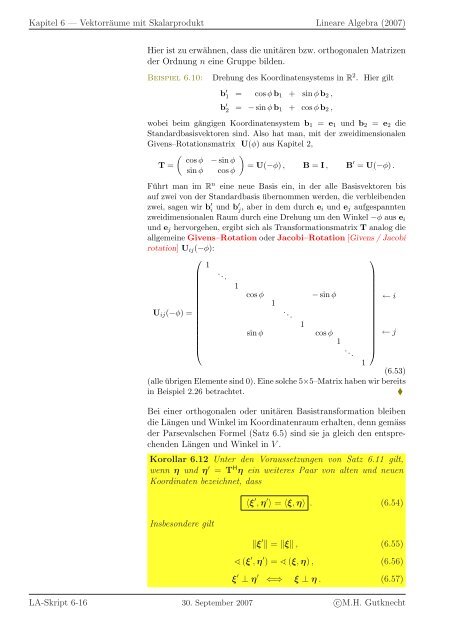
Führt man im R n eine neue Basis ein, in der alle Basisvektoren bis<br />
auf zwei von der Standardbasis übernommen werden, die verbleibenden<br />
zwei, sagen wir b ′ i und b′ j , aber in dem durch e i und e j aufgespannten<br />
zweidimensionalen Raum durch eine Drehung um den Winkel −φ aus e i<br />
und e j hervorgehen, ergibt sich als Transformationsmatrix T analog die<br />
allgemeine Givens–Rotation oder Jacobi–Rotation [Givens / Jacobi<br />
rotation] U ij (−φ):<br />
⎛<br />
⎞<br />
1 ... 1<br />
cos φ<br />
− sin φ<br />
← i<br />
1 U ij (−φ) =<br />
... 1<br />
sin φ<br />
cos φ<br />
← j<br />
⎜<br />
1 ⎟<br />
⎝<br />
... ⎠<br />
1<br />
(6.53)<br />
(alle übrigen Elemente sind 0). Eine solche 5×5–Matrix haben wir bereits<br />
in Beispiel 2.26 betrachtet.<br />
<br />
Bei einer orthogonalen oder unitären Basistransformation bleiben<br />
die Längen und Winkel im Koordinatenraum erhalten, denn gemäss<br />
der Parsevalschen Formel (Satz 6.5) sind sie ja gleich den entsprechenden<br />
Längen und Winkel in V .<br />
Korollar 6.12 Unter den Voraussetzungen von Satz 6.11 gilt,<br />
wenn η und η ′ = T H η ein weiteres Paar von alten und neuen<br />
Koordinaten bezeichnet, dass<br />
Insbesondere gilt<br />
〈ξ ′ , η ′ 〉 = 〈ξ, η〉 . (6.54)<br />
‖ξ ′ ‖ = ‖ξ‖ , (6.55)<br />
∢ (ξ ′ , η ′ ) = ∢ (ξ, η) , (6.56)<br />
ξ ′ ⊥ η ′ ⇐⇒ ξ ⊥ η . (6.57)<br />
LA-Skript 6-16 30. September 2007 c○M.H. Gutknecht













