

Lineare Algebra - SAM - ETH Zürich
Lineare Algebra - SAM - ETH Zürich
Lineare Algebra - SAM - ETH Zürich

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Kapitel 3 — LR–Zerlegung <strong>Lineare</strong> <strong>Algebra</strong> (2007)<br />
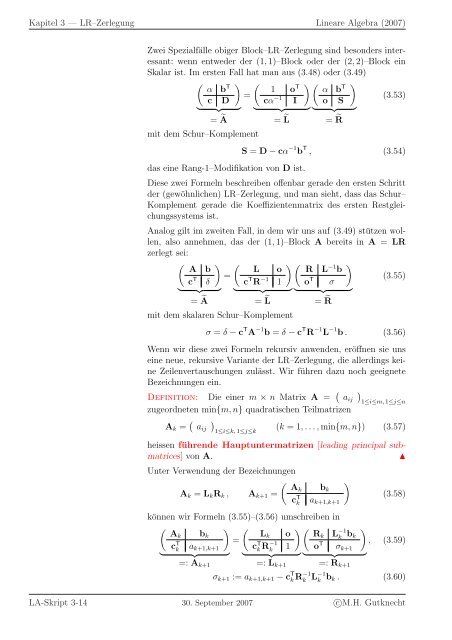
Zwei Spezialfälle obiger Block–LR–Zerlegung sind besonders interessant:<br />
wenn entweder der (1, 1)–Block oder der (2, 2)–Block ein<br />
Skalar ist. Im ersten Fall hat man aus (3.48) oder (3.49)<br />
( ) ( ) ( )<br />
α b<br />
T 1 o<br />
T α b<br />
T<br />
=<br />
(3.53)<br />
}<br />
c D<br />
{{ }<br />
= Ã<br />
mit dem Schur–Komplement<br />
}<br />
cα −1<br />
{{<br />
I<br />
}<br />
= ˜L<br />
das eine Rang-1–Modifikation von D ist.<br />
}<br />
o S<br />
{{ }<br />
= ˜R<br />
S = D − cα −1 b T , (3.54)<br />
Diese zwei Formeln beschreiben offenbar gerade den ersten Schritt<br />
der (gewöhnlichen) LR–Zerlegung, und man sieht, dass das Schur–<br />
Komplement gerade die Koeffizientenmatrix des ersten Restgleichungssystems<br />
ist.<br />
Analog gilt im zweiten Fall, in dem wir uns auf (3.49) stützen wollen,<br />
also annehmen, das der (1, 1)–Block A bereits in A = LR<br />
zerlegt sei:<br />
( ) (<br />
) ( )<br />
A b L o R L −1 b<br />
=<br />
(3.55)<br />
}<br />
c T δ<br />
{{ }<br />
= Ã<br />
}<br />
c T R −1 {{<br />
1<br />
}<br />
= ˜L<br />
mit dem skalaren Schur–Komplement<br />
}<br />
o T σ<br />
{{ }<br />
= ˜R<br />
σ = δ − c T A −1 b = δ − c T R −1 L −1 b . (3.56)<br />
Wenn wir diese zwei Formeln rekursiv anwenden, eröffnen sie uns<br />
eine neue, rekursive Variante der LR–Zerlegung, die allerdings keine<br />
Zeilenvertauschungen zulässt. Wir führen dazu noch geeignete<br />
Bezeichnungen ein.<br />
Definition: Die einer m × n Matrix A = ( a ij<br />
)1≤i≤m, 1≤j≤n<br />
zugeordneten min{m, n} quadratischen Teilmatrizen<br />
A k = ( a ij<br />
)1≤i≤k, 1≤j≤k<br />
(k = 1, . . . , min{m, n}) (3.57)<br />
heissen führende Hauptuntermatrizen [leading principal submatrices]<br />
von A.<br />
<br />
Unter Verwendung der Bezeichnungen<br />
( )<br />
Ak b k<br />
A k = L k R k , A k+1 =<br />
c T k a k+1,k+1<br />
(3.58)<br />
können wir Formeln (3.55)–(3.56) umschreiben in<br />
( ) ( ) (<br />
Ak b k<br />
Lk o Rk L −1<br />
k<br />
c T =<br />
b )<br />
k<br />
k a k+1,k+1 c T k<br />
} {{ }<br />
R−1 k<br />
1 o T , (3.59)<br />
σ k+1<br />
} {{ } } {{ }<br />
=: A k+1 =: L k+1 =: R k+1<br />
σ k+1 := a k+1,k+1 − c T k R −1<br />
k<br />
L−1 k b k . (3.60)<br />
LA-Skript 3-14 30. September 2007 c○M.H. Gutknecht













