

Lineare Algebra - SAM - ETH Zürich
Lineare Algebra - SAM - ETH Zürich
Lineare Algebra - SAM - ETH Zürich

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
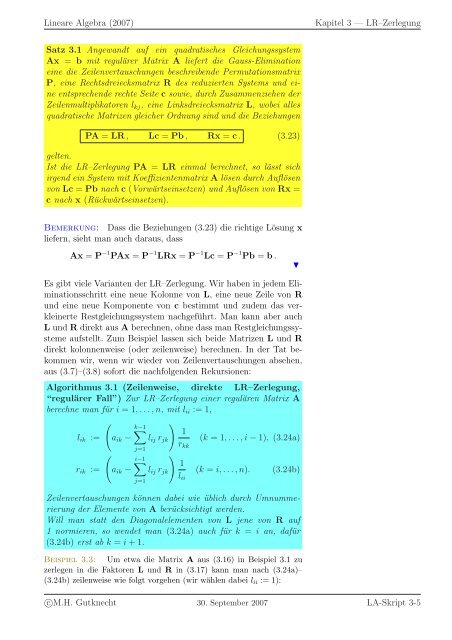
<strong>Lineare</strong> <strong>Algebra</strong> (2007)<br />
Kapitel 3 — LR–Zerlegung<br />
Satz 3.1 Angewandt auf ein quadratisches Gleichungssystem<br />
Ax = b mit regulärer Matrix A liefert die Gauss-Elimination<br />
eine die Zeilenvertauschungen beschreibende Permutationsmatrix<br />
P, eine Rechtsdreiecksmatrix R des reduzierten Systems und eine<br />
entsprechende rechte Seite c sowie, durch Zusammenziehen der<br />
Zeilenmultiplikatoren l kj , eine Linksdreiecksmatrix L, wobei alles<br />
quadratische Matrizen gleicher Ordnung sind und die Beziehungen<br />
PA = LR , Lc = Pb , Rx = c . (3.23)<br />
gelten.<br />
Ist die LR–Zerlegung PA = LR einmal berechnet, so lässt sich<br />
irgend ein System mit Koeffizientenmatrix A lösen durch Auflösen<br />
von Lc = Pb nach c (Vorwärtseinsetzen) und Auflösen von Rx =<br />
c nach x (Rückwärtseinsetzen).<br />
Bemerkung: Dass die Beziehungen (3.23) die richtige Lösung x<br />
liefern, sieht man auch daraus, dass<br />
Ax = P −1 PAx = P −1 LRx = P −1 Lc = P −1 Pb = b .<br />
Es gibt viele Varianten der LR–Zerlegung. Wir haben in jedem Eliminationsschritt<br />
eine neue Kolonne von L, eine neue Zeile von R<br />
und eine neue Komponente von c bestimmt und zudem das verkleinerte<br />
Restgleichungssystem nachgeführt. Man kann aber auch<br />
L und R direkt aus A berechnen, ohne dass man Restgleichungssysteme<br />
aufstellt. Zum Beispiel lassen sich beide Matrizen L und R<br />
direkt kolonnenweise (oder zeilenweise) berechnen. In der Tat bekommen<br />
wir, wenn wir wieder von Zeilenvertauschungen absehen,<br />
aus (3.7)–(3.8) sofort die nachfolgenden Rekursionen:<br />
Algorithmus 3.1 (Zeilenweise, direkte LR–Zerlegung,<br />
“regulärer Fall”) Zur LR–Zerlegung einer regulären Matrix A<br />
berechne man für i = 1, . . . , n, mit l ii := 1,<br />
(<br />
)<br />
∑k−1<br />
1<br />
l ik := a ik − l ij r jk (k = 1, . . . , i − 1), (3.24a)<br />
r ik :=<br />
j=1<br />
j=1<br />
r kk<br />
(<br />
)<br />
∑i−1<br />
1<br />
a ik − l ij r jk (k = i, . . . , n). (3.24b)<br />
l ii<br />
Zeilenvertauschungen können dabei wie üblich durch Umnummerierung<br />
der Elemente von A berücksichtigt werden.<br />
Will man statt den Diagonalelementen von L jene von R auf<br />
1 normieren, so wendet man (3.24a) auch für k = i an, dafür<br />
(3.24b) erst ab k = i + 1.<br />
Beispiel 3.3: Um etwa die Matrix A aus (3.16) in Beispiel 3.1 zu<br />
zerlegen in die Faktoren L und R in (3.17) kann man nach (3.24a)–<br />
(3.24b) zeilenweise wie folgt vorgehen (wir wählen dabei l ii := 1):<br />
c○M.H. Gutknecht 30. September 2007 LA-Skript 3-5













