- Page 2 and 3:
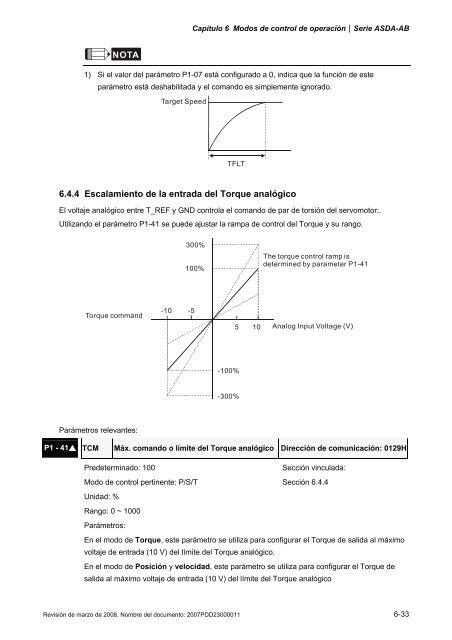
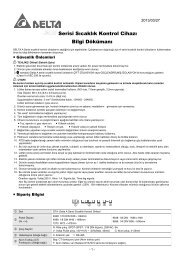
Muchas gracias por comprar los prod
- Page 4 and 5:
Verificación durante el desembalaj
- Page 6 and 7:
Revision March 2008, Doc. Name: 200
- Page 8 and 9:
Revisión de marzo de 2008, Nombre
- Page 10 and 11:
Revisión de marzo de 2008, Nombre
- Page 12 and 13:
About this Manual… Información p
- Page 14 and 15:
Capítulo 1 Verificación durante e
- Page 16 and 17:
Capítulo 1 Verificación en el des
- Page 18 and 19:
Capítulo 1 Verificación en el des
- Page 20 and 21:
Modelos de 110 V Capítulo 1 Verifi
- Page 22 and 23:
Capítulo 1 Verificación en el des
- Page 24 and 25:
2.1 Notas de instalación Capítulo
- Page 26 and 27:
Capítulo 2 Instalación y almacena
- Page 28 and 29:
Capítulo 3 Conexiones y cableado E
- Page 30 and 31:
3.1.2 Conectores y terminales del S
- Page 32 and 33:
3.1.3 Métodos de cableado Capítul
- Page 34 and 35:
Capítulo 3 Conexiones y cableado|S
- Page 36 and 37:
Identificación de terminal AMP (1-
- Page 38 and 39:
3.2 Cableado básico Capítulo 3 Co
- Page 40 and 41:
Capítulo 3 Conexiones y cableado|S
- Page 42 and 43:
Capítulo 3 Conexiones y cableado|S
- Page 44 and 45:
Fuerza Fuerza Señal Nº de clavija
- Page 46 and 47:
Señal DO Código DO TPOS 05 TQL 06
- Page 48 and 49:
Tabla 3. C Señales DI DI Señal C
- Page 50 and 51:
DI Señal Código DI Modo de contro
- Page 52 and 53:
Tabla 3. G Señales DI y modos de c
- Page 54 and 55:
Señal DI Código MD0 33 MD1 34 MDP
- Page 56 and 57:
3.3.3 Señales DI y DO definidas po
- Page 58 and 59:
Capítulo 3 Conexiones y cableado|S
- Page 60 and 61:
3.4 Conector CN2 del encoder Capít
- Page 62 and 63:
Nº de clavija. 5 6 Nombre de la se
- Page 64 and 65:
3.6.2 Modo de control de posición
- Page 66 and 67:
3.6.4 Modo de control de posición
- Page 68 and 69:
3.6.6 Modo de control de velocidad
- Page 70 and 71:
3.6.8 Modo de control del Torque (m
- Page 72 and 73:
Capítulo 4 Pantalla y operación E
- Page 74 and 75:
4.3 Exhibición del estado 4.3.1 Ex
- Page 76 and 77:
P0-02 Parámetro 6 7 8 9 10 11 12 1
- Page 78 and 79:
4.4.2 Operación del avance paso a
- Page 80 and 81:
Capítulo 4 Pantalla y operación|S
- Page 82 and 83:
Figura 4.7 4.4.6 Operación del dia
- Page 84 and 85:
Capítulo 5 Operación de prueba y
- Page 86 and 87:
5.2 Energización del Servodrive Ca
- Page 88 and 89:
Capítulo 5 operación de prueba y
- Page 90 and 91:
NOTA Capítulo 5 operación de prue
- Page 92 and 93: Capítulo 5 operación de prueba y
- Page 94 and 95: Capítulo 5 operación de prueba y
- Page 96 and 97: Capítulo 5 operación de prueba y
- Page 98 and 99: Capítulo 5 operación de prueba y
- Page 100 and 101: Capítulo 5 operación de prueba y
- Page 102 and 103: Capítulo 5 operación de prueba y
- Page 104 and 105: Capítulo 5 operación de prueba y
- Page 106 and 107: Capítulo 5 operación de prueba y
- Page 108 and 109: Capítulo 5 operación de prueba y
- Page 110 and 111: Capítulo 6 Modos de control de la
- Page 112 and 113: Capítulo 6 Modos de control de ope
- Page 114 and 115: 10 turns Capítulo 6 Modos de contr
- Page 116 and 117: Position Speed Rated speed Torque P
- Page 118 and 119: P1 - 45▲ GR2 Parámetros: Capítu
- Page 120 and 121: Capítulo 6 Modos de control de ope
- Page 122 and 123: Capítulo 6 Modos de control de ope
- Page 124 and 125: Capítulo 6 Modos de control de ope
- Page 126 and 127: Parámetros relevantes: Capítulo 6
- Page 128 and 129: Filtro de curva S del comando de la
- Page 130 and 131: Capítulo 6 Modos de control de ope
- Page 132 and 133: Capítulo 6 Modos de control de ope
- Page 134 and 135: Dominio de frecuencias Capítulo 6
- Page 136 and 137: Capítulo 6 Modos de control de ope
- Page 138 and 139: Filtro pasabajos Capítulo 6 Modos
- Page 140 and 141: 6.4 Modo de control del Torque Cap
- Page 144 and 145: 6.5 Selección de los modos de cont
- Page 146 and 147: Capítulo 6 Modos de control de ope
- Page 148 and 149: Capítulo 6 Modos de control de ope
- Page 150 and 151: Capítulo 6 Modos de control de ope
- Page 152 and 153: Serie ECMA Frecuencia admisible (ve
- Page 154 and 155: A B not used Capítulo 6 Modos de c
- Page 156 and 157: 6.6.5 Freno electromagnético Capí
- Page 158 and 159: Capítulo 6 Modos de control de ope
- Page 160 and 161: 7.1 Definición Existen los siguien
- Page 162 and 163: Grupo 1: P1-xx Capítulo 7 Parámet
- Page 164 and 165: Capítulo 7 Parámetros del servo|S
- Page 166 and 167: Capítulo 7 Parámetros del servo|S
- Page 168 and 169: Grupo 3: P3-xx Capítulo 7 Parámet
- Page 170 and 171: Capítulo 7 Parámetros del servo|S
- Page 172 and 173: Parámetro Nombre Función P1-04 MO
- Page 174 and 175: Parámetro Nombre Función P2-00 KP
- Page 176 and 177: Parámetro Nombre Función P1-33●
- Page 178 and 179: Parámetro Nombre Función P1-01●
- Page 180 and 181: Configuración de la E/S digital y
- Page 182 and 183: Parámetro Nombre Función Capítul
- Page 184 and 185: Parámetro Nombre Función P1-31 MS
- Page 186 and 187: Capítulo 7 Parámetros del servo|S
- Page 188 and 189: Capítulo 7 Parámetros del servo|S
- Page 190 and 191: P0 - 13 MAP4 P0 - 14 MAP5 P0 - 15 M
- Page 192 and 193:
Grupo 1: Parámetros básicos de P1
- Page 194 and 195:
Capítulo 7 Parámetros del servo|S
- Page 196 and 197:
P1 - 07 P1 - 08 TFLT Constante unif
- Page 198 and 199:
Capítulo 7 Parámetros del servo|S
- Page 200 and 201:
Capítulo 7 Parámetros del servo|S
- Page 202 and 203:
Capítulo 7 Parámetros del servo|S
- Page 204 and 205:
0: Modo de posicionamiento absoluto
- Page 206 and 207:
Capítulo 7 Parámetros del servo|S
- Page 208 and 209:
P1 - 43 P1 - 44▲ GR1 Capítulo 7
- Page 210 and 211:
Capítulo 7 Parámetros del servo|S
- Page 212 and 213:
P1 - 48 P1 - 49 P1 - 50 3: Configur
- Page 214 and 215:
Capítulo 7 Parámetros del servo|S
- Page 216 and 217:
Grupo 2: Parámetros de extensión
- Page 218 and 219:
Capítulo 7 Parámetros del servo|S
- Page 220 and 221:
P2 - 10 DI1 Terminal 1 de entrada d
- Page 222 and 223:
Capítulo 7 Parámetros del servo|S
- Page 224 and 225:
P2 - 25 NLP Constante de tiempo del
- Page 226 and 227:
NOTA Capítulo 7 Parámetros del se
- Page 228 and 229:
Capítulo 7 Parámetros del servo|S
- Page 230 and 231:
P2 - 40 P2 - 41 P2 - 42 P2 - 43 POV
- Page 232 and 233:
P2 - 47 P2 - 48 PED Tiempo de retar
- Page 234 and 235:
P2 - 50 DCLR Modo de eliminación d
- Page 236 and 237:
Capítulo 7 Parámetros del servo|S
- Page 238 and 239:
Capítulo 7 Parámetros del servo|S
- Page 240 and 241:
Capítulo 7 Parámetros del servo|S
- Page 242 and 243:
Grupo 3: Parámetros de comunicaci
- Page 244 and 245:
P3 - 04 CWD Detección del interval
- Page 246 and 247:
Grupo 4: Parámetros de diagnóstic
- Page 248 and 249:
P4 - 06 ▲ ■ P4 - 07■ ITST Cap
- Page 250 and 251:
P4 - 12 SOF2 P4 - 13 TOF1 P4 - 14 T
- Page 252 and 253:
Capítulo 7 Parámetros del servo|S
- Page 254 and 255:
Tabla 7.A Definición de la funció
- Page 256 and 257:
Signo Valor del parámetro TCM0 16
- Page 258 and 259:
Signo Valor del parámetro GNUM0 43
- Page 260 and 261:
Signo Valor del parámetro HOME 09
- Page 262 and 263:
8.1 Interfaz del hardware de comuni
- Page 264 and 265:
Conexión de los cables Capítulo 8
- Page 266 and 267:
8.2 Valores de los parámetros de c
- Page 268 and 269:
Capítulo 8 Comunicaciones de MODBU
- Page 270 and 271:
8.3 Protocolo de comunicación MODB
- Page 272 and 273:
STX (Inicio de la comunicación) Mo
- Page 274 and 275:
Modo RTU: Capítulo 8 Comunicacione
- Page 276 and 277:
Modo RTU: Capítulo 8 Comunicacione
- Page 278 and 279:
8.4 Escritura y lectura del paráme
- Page 280 and 281:
Capítulo 9 Mantenimiento e inspecc
- Page 282 and 283:
Relé Capítulo 9 Mantenimiento e i
- Page 284 and 285:
Capítulo 10 Solución de problemas
- Page 286 and 287:
10.2 Causa potencial y acciones cor
- Page 288 and 289:
: Desviación excesiva Capítulo 10
- Page 290 and 291:
: Error de comunicación serie Cap
- Page 292 and 293:
10.3 Eliminación de fallas Capítu
- Page 294 and 295:
11.1 Especificaciones del Servodriv
- Page 296 and 297:
Capítulo 11 Especificaciones|Serie
- Page 298 and 299:
Modelo: Serie ECMA Tiempo liberaci
- Page 300 and 301:
11.3 Curvas de velocidad / Torque d
- Page 302 and 303:
Cuadro del tiempo de carga y de ope
- Page 304 and 305:
Cuadro del tiempo de carga y de ope
- Page 306 and 307:
Cuadro del tiempo de carga y de ope
- Page 308 and 309:
Cuadro del tiempo de carga y de ope
- Page 310 and 311:
Capítulo 11 Especificaciones|Serie
- Page 312 and 313:
Ordene el N/P: ASD-A2023-AB (2 kW)
- Page 314 and 315:
Tamaño del bastidor del servomotor
- Page 316 and 317:
11.7 Selección de filtros EMI Cap
- Page 318 and 319:
Capítulo 12 Ejemplos de aplicació
- Page 320 and 321:
12.2 Alimentación del rodillo Cap
- Page 322 and 323:
Operación Reiniciar el equipo par
- Page 324 and 325:
REV POS JOG+ JOG- ZERO X2 X3 S0 X5
- Page 326 and 327:
S1 3 M54 Capítulo 12 Ejemplos de a
- Page 328 and 329:
Capítulo 12 Ejemplos de aplicació
- Page 330 and 331:
Capítulo 12 Ejemplos de aplicació
- Page 332 and 333:
12.6 Control de la etapa de aliment
- Page 334 and 335:
Capítulo 12 Ejemplos de aplicació
- Page 336 and 337:
Definiciones de las señales DO (AC
- Page 338 and 339:
(2) Modo de control de la etapa de
- Page 340 and 341:
(4) Modo de control 2 de la etapa m
- Page 342 and 343:
Explicación del ejemplo de control
- Page 344 and 345:
Capítulo 12 Ejemplos de aplicació
- Page 346 and 347:
(2) Modo de operación automática
- Page 348 and 349:
12.8 Función de retorno a la posic
- Page 350 and 351:
Capítulo 12 Ejemplos de aplicació
- Page 352 and 353:
Capítulo 12 Ejemplos de aplicació
- Page 354 and 355:
5. B/A = 2/2 SPEED 6. B/A = 2/3 SPE
- Page 356 and 357:
12.9 Ejemplos de conexión del cont
- Page 358 and 359:
Conexión a Mitsubishi FX1PG Capít
- Page 360 and 361:
Conexión a Mitsubishi AD75 Capítu
- Page 362 and 363:
Conectores de fuerza Número de pie
- Page 364 and 365:
Cables de fuerza, continuacion. Nú
- Page 366 and 367:
Cables de fuerza, continuacion. Nú
- Page 368 and 369:
Cables del Encoder Número de pieza
- Page 370 and 371:
Servo Drive, servomotor y combinaci
- Page 372 and 373:
servo drive de 750 W y servomotor d
- Page 374 and 375:
servo drive de 2 kW y servomotor de