Capítulo 7 Parámetros del servo - Delta Electronics
Capítulo 7 Parámetros del servo - Delta Electronics
Capítulo 7 Parámetros del servo - Delta Electronics

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
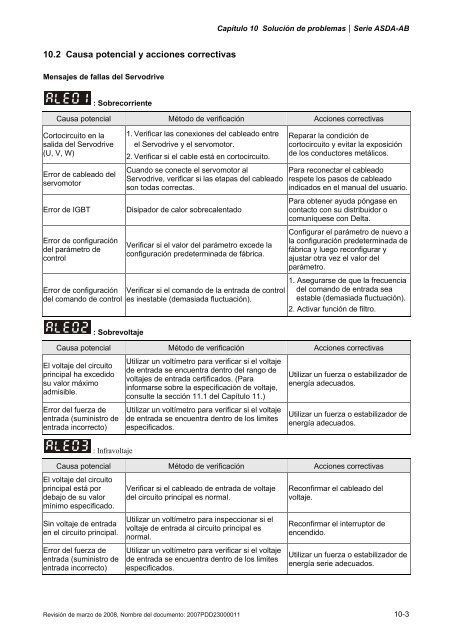
<strong>Capítulo</strong> 10 Solución de problemas|Serie ASDA-AB<br />
: Corrimiento <strong>del</strong> pulso Z<br />
Causa potencial Método de verificación Acciones correctivas<br />
El encoder está<br />
dañado.<br />
Inspeccionar el encoder en busca de daños.<br />
Reparar o reemplazar el<br />
<strong>servo</strong>motor.<br />
El encoder está suelto. Examinar el conector <strong>del</strong> encoder. Instalar de nuevo el <strong>servo</strong>motor.<br />
: Error de regeneración<br />
Causa potencial Método de verificación Acciones correctivas<br />
El resistor regenerativo<br />
no está conectado.<br />
Falla <strong>del</strong> transistor<br />
regenerativo de<br />
conmutación<br />
El valor <strong>del</strong> parámetro<br />
tiene un error<br />
: Sobrecarga<br />
Verificar la conexión <strong>del</strong> cableado <strong>del</strong> resistor<br />
regenerativo.<br />
Verificar si transistor regenerativo de<br />
conmutación está en cortocircuito.<br />
Confirmar la configuración <strong>del</strong> parámetro y las<br />
especificaciones <strong>del</strong> resistor regenerativo.<br />
Reconectar el resistor regenerativo.<br />
Para obtener ayuda póngase en<br />
contacto con su distribuidor o<br />
comuníquese con <strong>Delta</strong>.<br />
Reinicializar de nuevo el parámetro<br />
correctamente.<br />
Causa potencial Método de verificación Acciones correctivas<br />
El Servodrive ha<br />
excedido su carga<br />
nominal durante la<br />
operación continua.<br />
Verificar si el Servodrive está sobrecargado.<br />
Verificar si hay vibración mecánica<br />
El valor <strong>del</strong> parámetro<br />
<strong>del</strong> sistema de control es El parámetro <strong>del</strong> tiempo de<br />
incorrecto,<br />
aceleración/desaceleración es demasiado<br />
rápido.<br />
El cableado <strong>del</strong><br />
Servodrive y el encoder<br />
tiene un error.<br />
: Exceso de velocidad<br />
Verificar el cableado de U, V, W y el encoder.<br />
Aumentar la capacidad <strong>del</strong><br />
<strong>servo</strong>motor o reducir la carga.<br />
Ajustar el valor de la ganancia <strong>del</strong><br />
circuito de control.<br />
Reducir el valor <strong>del</strong> tiempo de<br />
aceleración/desaceleración.<br />
Asegurarse de que todo el<br />
cableado sea correcto.<br />
Causa potencial Método de verificación Acciones correctivas<br />
El comando de entrada<br />
de velocidad no es<br />
estable (demasiada<br />
fluctuación).<br />
El valor <strong>del</strong> parámetro<br />
de exceso de velocidad<br />
es defectuoso.<br />
Utilizar un detector de señales para detectar si<br />
la señal de entrada es anormal.<br />
Verificar si el valor de configuración <strong>del</strong><br />
parámetro de exceso de velocidad es<br />
demasiado bajo.<br />
: Comando de control de pulsos anormal<br />
Asegurarse de que la frecuencia<br />
<strong>del</strong> comando de entrada sea<br />
estable (no fluctúe demasiado) y<br />
activar la función de filtro (P1-06,<br />
P1-07 y P1-08).<br />
Configurar correctamente el valor<br />
<strong>del</strong> parámetro de exceso de<br />
velocidad (P2-34).<br />
Causa potencial Método de verificación Acciones correctivas<br />
La frecuencia <strong>del</strong><br />
comando de pulsos es<br />
mayor que frecuencia<br />
de entrada nominal.<br />
Utilizar el detector de frecuencia de pulsos<br />
para medir la frecuencia entrada.<br />
Configurar correctamente la<br />
frecuencia <strong>del</strong> pulso de entrada.<br />
10-4 Revisión de marzo de 2008, Nombre <strong>del</strong> documento: 2007PDD23000011