Capítulo 7 Parámetros del servo - Delta Electronics
Capítulo 7 Parámetros del servo - Delta Electronics
Capítulo 7 Parámetros del servo - Delta Electronics

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
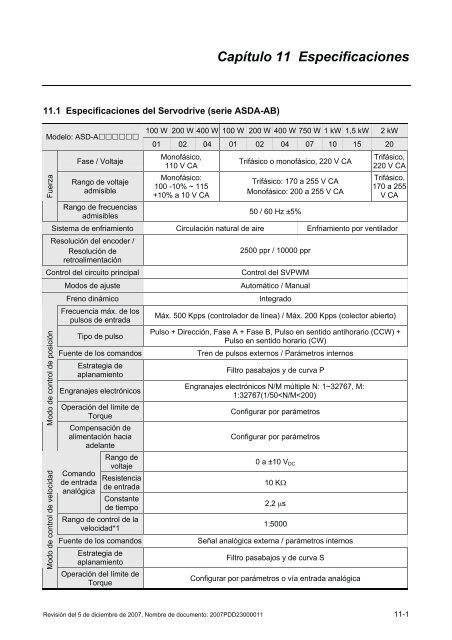
<strong>Capítulo</strong> 11 Especificaciones|Serie ASDA-AB<br />
100 W 200 W 400 W 100 W 200 W 400 W 750 W 1 kW 1,5 kW 2 kW<br />
Mo<strong>del</strong>o: ASD-A 01 02 04 01 02 04 07 10 15 20<br />
Modo de control <strong>del</strong> Torque<br />
Característica de<br />
responsividad<br />
Tasa de fluctuación de<br />
la velocidad *2<br />
Comando<br />
de entrada<br />
analógica<br />
Rango de<br />
voltaje<br />
Resistencia<br />
de entrada<br />
Constante<br />
de tiempo<br />
Fuente de los<br />
comandos<br />
Estrategia de<br />
aplanamiento<br />
Operación <strong>del</strong> límite de<br />
velocidad<br />
Salida de monitor analógico<br />
Entrada/salida<br />
digital<br />
Entrada<br />
Salida<br />
Funciones de protección<br />
Máxima 450 Hz<br />
0,01% o menos a una fluctuación de la carga entre 0 y 100%<br />
(a la velocidad nominal)<br />
0,01% o menos a una fluctuación <strong>del</strong> fuerza de ±10%<br />
(a la velocidad nominal)<br />
0,01% o menor a una fluctuación de la temperatura ambiental de 0 o C a<br />
50 o C (a la velocidad nominal)<br />
0 a ±10 VDC<br />
10 KΩ<br />
2,2 μs<br />
Señal analógica externa / parámetros internos<br />
Filtro pasabajos<br />
Configurando el parámetro o vía entrada analógica<br />
La señal <strong>del</strong> monitor puede ser configurada por parámetros<br />
(rango <strong>del</strong> voltaje de salida: ±8 V)<br />
Servo activado, Reinicializar, Conmutación de ganancia, Eliminación de<br />
pulsos, ENCLAVAMIENTO de la Velocidad cero, Velocidad y límite <strong>del</strong><br />
Torque habilitados, Parada de emergencia, Límite de inhibición de marcha<br />
a<strong>del</strong>ante/atrás., Conmutación <strong>del</strong> modo de posición/velocidad, Conmutación<br />
<strong>del</strong> modo de velocidad/Torque, Conmutación <strong>del</strong> modo de Torque / posición,<br />
Entrada de la selección de la etapa de alimentación, Entrada <strong>del</strong> modo de la<br />
etapa de alimentación, Entrada de la ejecución automática, Selección de la<br />
relación electrónica de engranajes (numerador)<br />
Salida <strong>del</strong> encoder señal (controladores de línea A, B, Z / colector abierto Z)<br />
Servo listo, Servo activado, A Velocidad cero, A velocidad alcanzada, A<br />
posicionamiento completado, A límite Torque, Alarma de <strong>servo</strong> (falla de<br />
<strong>servo</strong>) activada, Control <strong>del</strong> freno electromagnético, Retorno a la posición<br />
inicial finalizado, Advertencia de sobrecarga de la salida<br />
Advertencia <strong>del</strong> <strong>servo</strong> activada, comando de posición interna completado<br />
Sobrecorriente, Sobrevoltaje, Infravoltaje, Error de regeneración,<br />
Sobrecarga, Exceso de velocidad, Comando de control de pulsos anormal,<br />
Desviación excesiva, Tiempo cumplido de la ejecución <strong>del</strong> temporizador tipo<br />
perro guardián, Error <strong>del</strong> encoder, Error de ajuste, Parada de emergencia<br />
activada, Error <strong>del</strong> interruptor limitador de marcha a<strong>del</strong>ante/atrás, Error de<br />
temperatura <strong>del</strong> IGBT, Error de memoria, Error de comunicación DSP, Error<br />
de comunicación serie, Pérdida de fase en el fuerza de entrada, Tiempo<br />
cumplido para la comunicación serie, Error de escritura <strong>del</strong> comando,<br />
Terminales con protección contra cortocircuitos (terminales U, V , W , CN1,<br />
CN2 y CN3)<br />
Interfaz de comunicación RS-232 / RS-485 / RS-422<br />
11-2 Revisión de marzo de 2008, Nombre <strong>del</strong> documento: 2007PDD23000011