30845 Suppl Giot.pdf - Giornale Italiano di Ortopedia e Traumatologia
30845 Suppl Giot.pdf - Giornale Italiano di Ortopedia e Traumatologia
30845 Suppl Giot.pdf - Giornale Italiano di Ortopedia e Traumatologia

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Interfaccia intraneurale per il controllo <strong>di</strong> una protesi robotica <strong>di</strong> mano<br />
EEG<br />
Nella sessione preimpianto (PRE) è stato osservato solo un trascurabile<br />
decremento della potenza in banda alfa e beta durante<br />
gli eventi <strong>di</strong> trigger motorio. Nella seconda sessione, 3 settimane<br />
dopo l’impianto (POST) è stato osservato invece un forte pattern <strong>di</strong><br />
decremento della potenza nelle bande alfa2 e beta (Event Related<br />
Desynchronization) in corrispondenza dell’area sensorimotoria<br />
controlaterale all’arto perso negli istanti che precedevano un movimento<br />
volontario (Fig. 4). Questo secondo tipo <strong>di</strong> pattern <strong>di</strong> desincronizzazione<br />
testimonia una normalizzazione dell’attività ed è in<br />
linea con quanto descritto nel soggetto sano.<br />
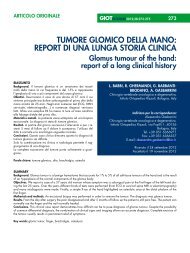
Fig. 4. Nelle prime tre colonne è schematizzata la topografia dello scalpo del rapporto ERD(blu)/<br />
ERS (rosso) nelle bande alfa-1, alfa-2 e beta, in una finestra temporale <strong>di</strong> 500-1500 ms dopo il<br />
trigger motorio dato al soggetto. I cerchietti rossi rappresentano i siti C3 e C4. Nell’ultima colonna<br />
è schematizzato il rapporto ERD/ERS a livello delle cortecce motorie primarie (C4 a destra e C3 a<br />
sinistra) in funzione del tempo trascorso dal trigger motorio (istante 0) e della frequenza. I rettangoli<br />
rossi in<strong>di</strong>cano le frequenze e le finestre temporali usate per la topografia dello scalpo. Le tre righe<br />
corrispondono rispettivamente all’esecuzione <strong>di</strong> movimenti con l’arto amputato prima e a 3 settimane<br />
dall’impianto e con l’arto sano 27 .<br />
TMS<br />
Stimolando l’emisfero sinistro e registrando dai muscoli <strong>di</strong>stali<br />
(ADM e ECD) e prossimali (BB e D) dell’arto sano controlaterale,<br />
sia il numero dei siti rispondenti che la soglia <strong>di</strong> stimolazione sono<br />
rimasti pressoché invariati prima e alla quarta settimana dall’impianto<br />
(muscoli <strong>di</strong>stali: PRE- siti rispondenti 22, soglia 37%; POST- siti<br />
rispondenti 20, soglia 36%. Muscoli prossimali: PRE- siti rispondenti<br />
30, soglia 52%; POST- siti rispondenti 35, soglia 53% ). Al<br />
contrario per quanto riguarda la stimolazione dell’emisfero destro<br />
con registrazione dai muscoli prossimali dell’arto amputato vi è stato<br />
un decremento significativo del numero <strong>di</strong> siti rispondenti (PRE<br />
36, POST 16) quin<strong>di</strong> una normalizzazione dell’estensione dell’area<br />
corticale <strong>di</strong> pertinenza <strong>di</strong> questi muscoli, che prima dell’impianto<br />
risultava iper-rappresentata. La soglia <strong>di</strong> stimolazione è rimasta<br />
pressoché costante (Fig. 5).<br />
Sindrome dell’arto fantasma<br />
Il soggetto presentava prima dell’impianto un’alterata percezione del<br />
suo fantasma d’arto, descrivendo la sua mano come se fosse <strong>di</strong>rettamente<br />
attaccata al gomito, senza quin<strong>di</strong> avambraccio, e come bloccata<br />
da una cinghia o un forte peso che ne impe<strong>di</strong>va il movimento. Alla<br />
fine delle quattro settimane <strong>di</strong> training con gli elettro<strong>di</strong> impiantati la<br />
percezione soggettiva del fantasma d’arto si è normalizzata (Fig. 6).<br />
Assieme a questa normalizzazione è stato riportato anche un miglioramento<br />
significativo del dolore da arto fantasma rilevato con 3<br />
S316<br />
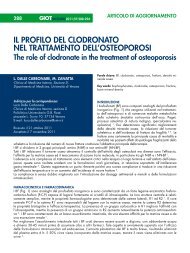
Fig. 5. Rappresentazione grafica dei siti rispondenti a stimolazione sulla corteccia motoria destra<br />
che controlla i muscoli prossimali dell’arto amputato prima dell’impianto (A) e a 3 settimane dopo<br />
l’impianto degli elettro<strong>di</strong> (B). (C) Visualizzazione ad istogrammi dei siti rispondenti prima l’impianto<br />
(rosso) e 3 settimane dopo (blu) rispettivamente per i muscoli prossimali e <strong>di</strong>stali dell’arto sano e<br />
prossimali dell’arto amputato 27 .<br />
<strong>di</strong>verse scale cliniche (versione<br />
ridotta del McGill Pain Questionaire<br />
– sfMcGill; Visual Analogue Scale<br />
– VAS; One Value scale) (Tab 1).<br />
I miglioramenti nel dolore e nella<br />
percezione dell’arto fantasma sono<br />
stati trovati regre<strong>di</strong>ti nella rivalutazione<br />
<strong>di</strong> follow-up fatta dopo 3 mesi<br />
dall’espianto degli elettro<strong>di</strong>, aumentando<br />
la valenza della <strong>di</strong>pendenza<br />
del miglioramento dall’uso del sistema<br />
protesico.<br />
Tab. 1. Mo<strong>di</strong>ficazioni nel dolore d’arto fantasma prima e dopo l’impianto e dopo<br />
tre mesi <strong>di</strong> follow-up valutate con tre <strong>di</strong>fferenti scale cliniche. Da (23).<br />
sfMcGill<br />
(0 → 45)<br />
One Value<br />
(0 → 5)<br />
VaS<br />
(0 → 100%)<br />
Pre-impianto 18 3 38<br />
Post-espianto 11 2 23<br />
Follow Up a 3 mesi 17 3 36<br />
CONCLuSIONI<br />
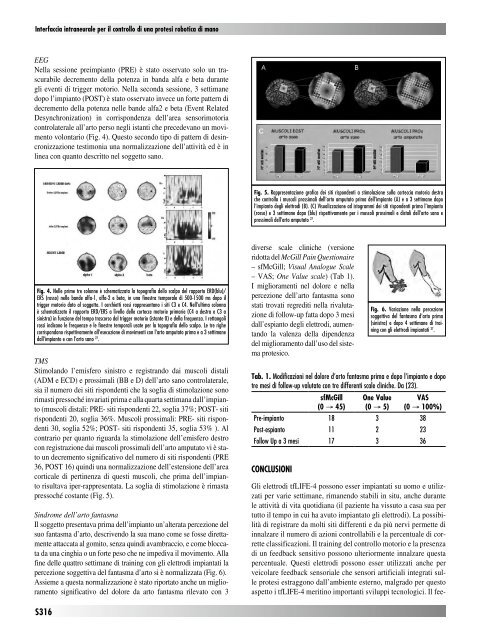
Fig. 6. Variazione nella percezione<br />
soggettiva del fantasma d’arto prima<br />
(sinistra) e dopo 4 settimane <strong>di</strong> training<br />
con gli elettro<strong>di</strong> impiantati 27 .<br />
Gli elettro<strong>di</strong> tfLIFE-4 possono esser impiantati su uomo e utilizzati<br />
per varie settimane, rimanendo stabili in situ, anche durante<br />
le attività <strong>di</strong> vita quoti<strong>di</strong>ana (il paziente ha vissuto a casa sua per<br />
tutto il tempo in cui ha avuto impiantato gli elettro<strong>di</strong>). La possibilità<br />
<strong>di</strong> registrare da molti siti <strong>di</strong>fferenti e da più nervi permette <strong>di</strong><br />
innalzare il numero <strong>di</strong> azioni controllabili e la percentuale <strong>di</strong> corrette<br />
classificazioni. Il training del controllo motorio e la presenza<br />
<strong>di</strong> un feedback sensitivo possono ulteriormente innalzare questa<br />
percentuale. Questi elettro<strong>di</strong> possono esser utilizzati anche per<br />
veicolare feedback sensoriale che sensori artificiali integrati sulle<br />
protesi estraggono dall’ambiente esterno, malgrado per questo<br />
aspetto i tfLIFE-4 meritino importanti sviluppi tecnologici. Il fee-