- Seite 2 und 3:
Die Deutsche Bibliothek - CIP-Einhe
- Seite 4 und 5:
4 Vorwort
- Seite 6 und 7:
6 Inhalt 3.3.2 Zweistufige Stromric
- Seite 8 und 9:
8 Inhalt 9.2.1.2 Resultate . . . .
- Seite 10 und 11:
10 Inhalt 16.2 Steuerverfahren . .
- Seite 12 und 13:
12 Verzeichnis der verwendeten Symb
- Seite 14 und 15:
14 Verzeichnis der verwendeten Symb
- Seite 16 und 17:
16 1 Einleitung als Zwischenkreisum
- Seite 18 und 19:
18 1 Einleitung frequenz: ihre Erh
- Seite 20 und 21:
2 Funktion und Aufbau von modernen
- Seite 22 und 23:
22 2 Funktion und Aufbau von modern
- Seite 24 und 25:
24 2 Funktion und Aufbau von modern
- Seite 26 und 27:
26 2 Funktion und Aufbau von modern
- Seite 28 und 29:
28 2 Funktion und Aufbau von modern
- Seite 30 und 31:
30 2 Funktion und Aufbau von modern
- Seite 32 und 33:
32 2 Funktion und Aufbau von modern
- Seite 34 und 35:
34 3 Leistungskreis von Frequenzumr
- Seite 36 und 37:
36 3 Leistungskreis von Frequenzumr
- Seite 38 und 39:
38 3 Leistungskreis von Frequenzumr
- Seite 40 und 41:
40 3 Leistungskreis von Frequenzumr
- Seite 42 und 43:
42 3 Leistungskreis von Frequenzumr
- Seite 44 und 45:
44 3 Leistungskreis von Frequenzumr
- Seite 46 und 47:
46 3 Leistungskreis von Frequenzumr
- Seite 48 und 49:
48 3 Leistungskreis von Frequenzumr
- Seite 50 und 51:
50 3 Leistungskreis von Frequenzumr
- Seite 52 und 53:
52 3 Leistungskreis von Frequenzumr
- Seite 54 und 55:
54 3 Leistungskreis von Frequenzumr
- Seite 56 und 57:
56 3 Leistungskreis von Frequenzumr
- Seite 58 und 59:
58 3 Leistungskreis von Frequenzumr
- Seite 60 und 61:
60 3 Leistungskreis von Frequenzumr
- Seite 62 und 63:
62 3 Leistungskreis von Frequenzumr
- Seite 64 und 65:
64 3 Leistungskreis von Frequenzumr
- Seite 66 und 67:
66 3 Leistungskreis von Frequenzumr
- Seite 68 und 69:
68 3 Leistungskreis von Frequenzumr
- Seite 70 und 71:
70 3 Leistungskreis von Frequenzumr
- Seite 72 und 73:
4 Regelkonzepte für selbstgeführt
- Seite 74 und 75:
74 4 Regelkonzepte für selbstgefü
- Seite 76 und 77:
76 4 Regelkonzepte für selbstgefü
- Seite 78 und 79:
78 4 Regelkonzepte für selbstgefü
- Seite 80 und 81:
80 4 Regelkonzepte für selbstgefü
- Seite 82 und 83:
82 4 Regelkonzepte für selbstgefü
- Seite 84 und 85:
84 5 Beschreibung von Stromrichtern
- Seite 86 und 87:
86 5 Beschreibung von Stromrichtern
- Seite 88 und 89:
88 5 Beschreibung von Stromrichtern
- Seite 90 und 91:
90 5 Beschreibung von Stromrichtern
- Seite 92 und 93:
92 5 Beschreibung von Stromrichtern
- Seite 94 und 95:
94 5 Beschreibung von Stromrichtern
- Seite 96 und 97:
96 5 Beschreibung von Stromrichtern
- Seite 98 und 99:
98 5 Beschreibung von Stromrichtern
- Seite 100 und 101:
u A0 4 -- π U ⎛ ∞ ⎞ d 1 = --
- Seite 102 und 103:
6.2 Einphasige Brücke 101 Aus den
- Seite 104 und 105:
6.2 Einphasige Brücke 103 nimmt er
- Seite 106 und 107:
1 0 U d/2 U d /2 U d/2 u U -1 U d/2
- Seite 108 und 109:
6.3 Dreiphasige Brücke 107 Zwische
- Seite 110 und 111:
7 Trägerverfahren Trägerverfahren
- Seite 112 und 113:
1 0.5 0 -0.5 -1 s A ~u A0 x T 0 0.2
- Seite 114 und 115:
dB 10 0 -10 -20 -30 -40 -50 -60 0 5
- Seite 116 und 117:
7.1 Funktionsprinzip der Trägerver
- Seite 118 und 119:
7.1 Funktionsprinzip der Trägerver
- Seite 120 und 121:
7.1 Funktionsprinzip der Trägerver
- Seite 122 und 123:
7.1 Funktionsprinzip der Trägerver
- Seite 124 und 125:
iA, ν iA, VZ I2 A, VZ, eff 1 ûA0,
- Seite 126 und 127:
7.2 Halbbrücke 125 Spannungs-Effek
- Seite 128 und 129:
7.3 Einphasige Brücke 7.3 Einphasi
- Seite 130 und 131:
7.3 Einphasige Brücke 129 maximal
- Seite 132 und 133:
uAB, Soll = UdM cos( ω1t + ϕx), u
- Seite 134 und 135:
Ud IB 1 0.5 0 -0.5 -1 10*i A,VZ u A
- Seite 136 und 137:
7.4 Dreiphasige Brücke 135 Aus (7.
- Seite 138 und 139:
7.4 Dreiphasige Brücke 137 den Pha
- Seite 140 und 141:
7.4 Dreiphasige Brücke 139 punktsp
- Seite 142 und 143:
1.5 î U 1 0.5 0 -0.5 -1 i d I d -1
- Seite 144 und 145:
7.4 Dreiphasige Brücke 143 Phasens
- Seite 146 und 147:
1.2 U d /2 1oo oo oo oo o o 0.8 0.6
- Seite 148 und 149:
t 2 TT ----- 2 u ( V0, Soll- uW0, S
- Seite 150 und 151:
7.4 Dreiphasige Brücke 149 riode T
- Seite 152 und 153:
Mˆ el, VZ 3TT --------------- 8ω1
- Seite 154 und 155:
8.2 Freiheitsgrade bei Drehzeigermo
- Seite 156 und 157:
u a u b = 1 u = 1 t1 U ------------
- Seite 158 und 159:
8.2.2 Abfolge der Stromrichterzust
- Seite 160 und 161:
8.2 Freiheitsgrade bei Drehzeigermo
- Seite 162 und 163:
U d/2 1 0.5 0 -0.5 -1 u N0 u U, u U
- Seite 164 und 165:
dB 10 0 . -10 -20 -30 -40 -50 . . .
- Seite 166 und 167:
8.3 Analogie zwischen Drehzeigermod
- Seite 168 und 169:
8.4 Phasenspannungen, Verzerrungsst
- Seite 170 und 171:
9.1 Funktionsprinzip 169 Dasselbe P
- Seite 172 und 173:
s U s V s W α 1 α 1 9.2 Selektive
- Seite 174 und 175:
9.2 Selektive Elimination von Harmo
- Seite 176 und 177:
ad U d I B 1.4 1.2 1 0.8 0.6 0.4 0.
- Seite 178 und 179:
9.2 Selektive Elimination von Harmo
- Seite 180 und 181:
s U s U Typ 1 Typ 2 9.2 Selektive E
- Seite 182 und 183:
I B 0.05 0.045 0.04 0.035 0.03 0.02
- Seite 184 und 185:
0.2 0.15 0.1 0.05 0 0 Z 0.5 û ν=1
- Seite 186 und 187:
I q+1 I q π-αq π/2(=π-αq+1) I
- Seite 188 und 189:
9.3 Optimierte Pulsmuster 187 einer
- Seite 190 und 191:
9.3 Optimierte Pulsmuster 189 Diese
- Seite 192 und 193:
9.3 Optimierte Pulsmuster 191 (9.29
- Seite 194 und 195: 9.3.3.2 Resultate der Optimierung 9
- Seite 196 und 197: 9.3 Optimierte Pulsmuster 195 Da de
- Seite 198 und 199: 9.3 Optimierte Pulsmuster 197 Bei d
- Seite 200 und 201: 9.3 Optimierte Pulsmuster 199 Minim
- Seite 202 und 203: 9.3.5.2 Realisierung von Übergäng
- Seite 204 und 205: 9.3 Optimierte Pulsmuster 203 vergl
- Seite 206 und 207: 10.1 Halbbrücke mit Zweipunktregle
- Seite 208 und 209: 10.1 Halbbrücke mit Zweipunktregle
- Seite 210 und 211: 1.2 f B 1 0.8 0.6 0.4 0.2 f inst |m
- Seite 212 und 213: 10.1 Halbbrücke mit Zweipunktregle
- Seite 214 und 215: f inst Ud --------- LkIδ 1 diSoll
- Seite 216 und 217: 10.2 Einphasige Brücke mit Dreipun
- Seite 218 und 219: 10.3 Dreiphasige Brücke mit Zweipu
- Seite 220 und 221: 50 45 40 35 30 25 20 15 10 5 o o c
- Seite 222 und 223: 1 I n 0.5 0 -0.5 -1 1.5 U d/2 . 0 0
- Seite 224 und 225: 2I δ b c β I δ 1.15I δ a α 10.
- Seite 226 und 227: 10.5 Diskrete Schaltzustandsänderu
- Seite 228 und 229: 10.5 Diskrete Schaltzustandsänderu
- Seite 230 und 231: 11.2 Stromzeiger-Komponentenregelun
- Seite 232 und 233: t 4 0/7 U-e 3 U t 3 t 2 i Str,VZ,α
- Seite 234 und 235: 11.2 Stromzeiger-Komponentenregelun
- Seite 236 und 237: 1.5 I n 0.5 -0.5 β 1.5 I n 1 0.5 0
- Seite 238 und 239: 11.2 Stromzeiger-Komponentenregelun
- Seite 240 und 241: 11.3 Prädiktive Stromregelung 239
- Seite 242 und 243: 11.3 Prädiktive Stromregelung 241
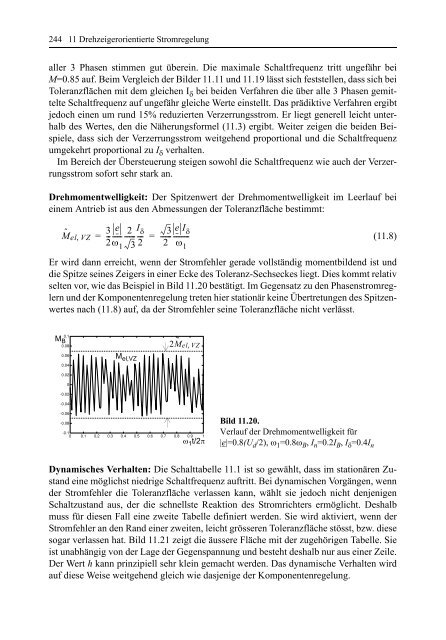
- Seite 246 und 247: Iδ Iδ+Ih SIV SIII β SII SV SVI S
- Seite 248 und 249: i Soll i Str ω 1 Beobachter für e
- Seite 250 und 251: 11.3 Prädiktive Stromregelung 249
- Seite 252 und 253: 12 Spezielle Steuerverfahren für D
- Seite 254 und 255: 12.1 Flussorientierte Stromregelung
- Seite 256 und 257: β ω S,Soll Ψ S,Soll α 12.2 Dire
- Seite 258 und 259: Mel,Soll + SIV - sM + |Ψ S,Soll |
- Seite 260 und 261: 12.2 Direkte Fluss- und Drehmomentr
- Seite 262 und 263: 12.3 Deltamodulation 261 dings nich
- Seite 264 und 265: 12.3 Deltamodulation 263 Die Schalt
- Seite 266 und 267: 13.2 Kennlinien 13.2 Kennlinien 265
- Seite 268 und 269: 0.045 I B IA,VZ,eff 0.04 0.035 0.03
- Seite 270 und 271: U B ----------ωBLk M B 0.035 0.03
- Seite 272 und 273: 13.4 Frequenzbereiche 271 Tabelle 1
- Seite 274 und 275: 13.5 Dynamik 13.5 Dynamik 273 Tabel
- Seite 276 und 277: Teil III Anwendung der Steuerverfah
- Seite 278 und 279: U-Stromrichter I-Stromrichter s A s
- Seite 280 und 281: u d i d s I,U+ s I,U- S U+ s I,V+ S
- Seite 282 und 283: 4 Z 3 Z S2 7 Z S4 5 S5 Z S2 S1 0 Z
- Seite 284 und 285: 14.2 Dreiphasige Brücke 283 gänge
- Seite 286 und 287: 10 dB i U 0 -10 -20 -30 -40 -50 -60
- Seite 288 und 289: i d U d i a,d i b,d i c,d Stromrich
- Seite 290 und 291: Stromrichter a Stromrichter b Strom
- Seite 292 und 293: U B 1 0.5 0 -0.5 -1 1.5 1 0.5 0 -0.
- Seite 294 und 295:
15.1 Serieschaltung von Stromrichte
- Seite 296 und 297:
15.1 Serieschaltung von Stromrichte
- Seite 298 und 299:
15.2 Parallelschaltung von Stromric
- Seite 300 und 301:
15.2 Parallelschaltung von Stromric
- Seite 302 und 303:
Stromrichter a Stromrichter b u a,U
- Seite 304 und 305:
Stromrichter a Stromrichter b Strom
- Seite 306 und 307:
16.2 Steuerverfahren 305 pulse und
- Seite 308 und 309:
Die Steuerung des Stromrichter kann
- Seite 310 und 311:
16.2 Steuerverfahren 309 den Schalt
- Seite 312 und 313:
1.5 1 0.5 0 -0.5 -1 x U/V/W,Soll x
- Seite 314 und 315:
16.2.4 Weitere Steuerverfahren 16.2
- Seite 316 und 317:
Teil IV Praktischer Einsatz von Ste
- Seite 318 und 319:
Δx Soll 1 0.5 0 -0.5 -1 x T quanti
- Seite 320 und 321:
1 0.5 0 -0.5 -1 0 0.05 0.1 0.15 0.2
- Seite 322 und 323:
Ud/2 IB 1 0.5 0 -0.5 -1 x A,Soll s
- Seite 324 und 325:
1 Ud/2 IB 0.5 0 -0.5 -1 x A,Soll i
- Seite 326 und 327:
17.3 Stromrichteraufbau 325 Mit t r
- Seite 328 und 329:
f N netzseitiger L Stromrichter ud,
- Seite 330 und 331:
1 U d /2 0.5 0 -0.5 -1 u A0 x A,Sol
- Seite 332 und 333:
18.1 Umgebung von selbstgeführten
- Seite 334 und 335:
18.2 Normen und Vorschriften 18.2 N
- Seite 336 und 337:
Tabelle 18.2. Übersicht über die
- Seite 338 und 339:
19 Implementierung von Modulatoren
- Seite 340 und 341:
19.1 Schaltungen 339 durch die Stuf
- Seite 342 und 343:
19.1 Schaltungen 341 Hilfe von Oper
- Seite 344 und 345:
M f 1 Reg. T 1 Mikroprozessor PROM
- Seite 346 und 347:
19.3 Praktische Probleme 19.3 Prakt
- Seite 348 und 349:
19.3 Praktische Probleme 347 die Sc
- Seite 350 und 351:
Teil V Anhänge A Literatur Bücher
- Seite 352 und 353:
[Aml1] Amler G. (1991): A PWM curre
- Seite 354 und 355:
Electronics, Vol. 8, Nr. 4, S. 546-
- Seite 356 und 357:
[Per1] Persson E. (1992): Transient
- Seite 358 und 359:
B Verwendete Grundlagen B.1 Das Dre
- Seite 360 und 361:
B.1 Das Dreiphasensystem 359 und eW
- Seite 362 und 363:
B.2 Fourierreihe 361 sengrössen si
- Seite 364 und 365:
B.2.2 Nicht exakt periodische Signa
- Seite 366 und 367:
C Sachverzeichnis αβ-Darstellung
- Seite 368:
Verzerrungsstrom, minimaler 149 Vie