- Seite 1 und 2:
Vorlesung 401-2654-00L, Numerische
- Seite 3 und 4:
1.3.3.1 Grundbegriffe . . . . . . .
- Seite 5 und 6:
4 Strukturerhaltende numerische Int
- Seite 7 und 8:
• MATLAB-basierte Programmieraufg
- Seite 9 und 10:
Hinweise auf Fehler in den Vorlesun
- Seite 11 und 12:
Numerische Mathemtik 1 Einleitung V
- Seite 13 und 14:
✎ Notation (Newton): Punkt ˙ ˆ=
- Seite 15 und 16:
1.5 1.5 Numerische Mathemtik 1 1 y
- Seite 17 und 18:
5 6 % plot tangent field 7 f i g u
- Seite 19 und 20:
Verallgemeinerung: Eine gewöhnlich
- Seite 21 und 22:
Daher sind Darstellungsformeln wie
- Seite 23 und 24:
1.2.1 Ökologie Numerische Mathemti
- Seite 25 und 26:
Bemerkung 1.2.4 (AWP-Löser in MATL
- Seite 27 und 28:
(1.2.6) ⇒ 0 =(δ − γ u )˙u−
- Seite 29 und 30:
Definition 1.2.7 (Erstes Integral).
- Seite 31 und 32:
Beispiel 1.2.12 (Oregonator-Reaktio
- Seite 33 und 34:
Grössen: l = l(t) ˆ= Länge der H
- Seite 35 und 36:
5 6 f u n c t i o n beat(alpha,file
- Seite 37 und 38:
9 axis([tspan -3 3]); legend(’l(t
- Seite 39 und 40:
Definition 1.2.20 (Hamiltonsche Dif
- Seite 41 und 42:
←→ Hamiltonsches System (→ De
- Seite 43 und 44:
himpuls exakt, jedoch nicht die Ene
- Seite 45 und 46:
y (i) Numerische Mathemtik (iii) :
- Seite 47 und 48:
Ein einfaches Kriterium für lokale
- Seite 49 und 50:
Definition 1.3.7 (Evolutionsoperato
- Seite 51 und 52:
Lösung: ⎧ ⎨ y(t) = 1 y0 −1
- Seite 53 und 54:
Vorbereitung: Basiswechsel im Zusta
- Seite 55 und 56:
Ansatz: y(t) = exp(At)z(t) mitz ∈
- Seite 57 und 58:
1.3.3 Sensitivität [8, Sect. 3.1]
- Seite 59 und 60:
wobei‖·‖ ˆ= Matrixnorm induzi
- Seite 61 und 62:
Intervallweise Kondition: in[0,T]:
- Seite 63 und 64:
Bemerkung 1.3.32 („Gronwall-Schra
- Seite 65 und 66:
zum AWP (1.1.13) erfüllt Anfangswe
- Seite 67 und 68:
Listing 1.3: Numerische Integration
- Seite 69 und 70:
σ = 10, ρ = 28, β = 2.666667e+00
- Seite 71 und 72:
m 1 = 2, m 2 = 1, l 1 = 1, l 2 = 1.
- Seite 73 und 74:
1.4.1 Das explizite Euler-Verfahren
- Seite 75 und 76:
Bemerkung 1.4.3 (Explizites Eulerve
- Seite 77 und 78:
7 err = [err;erri]; % assemble matr
- Seite 79 und 80:
Definition 1.4.5 (Arten der Konverg
- Seite 81 und 82:
0.7 0.6 β = 0.5, γ = 0.5 β = 1.0
- Seite 83 und 84:
10 0 λ = 1.000000 λ = 3.000000 λ
- Seite 85 und 86:
Rekursion des expliziten Eulerverfa
- Seite 87 und 88:
Bemerkung 1.4.14 (Implizites Eulerv
- Seite 89 und 90:
( ) 1 k y k = y 0 ⇒ |y 1−λh k
- Seite 91 und 92:
5 % Implicit Euler 6 y_imp = y0; y
- Seite 93 und 94:
1 y = y_expl; 2 3 E_kin = 0.5*(y(2,
- Seite 95 und 96:
6 E_tot = E_kin + E_pot; 7 8 f i g
- Seite 97 und 98:
9 8 Energies for explicit Euler dis
- Seite 99 und 100:
✸ Numerische Mathemtik 1.4.3 Impl
- Seite 101 und 102:
Beispiel 1.4.21 (Implizite Mittelpu
- Seite 103 und 104:
Beispiel 1.4.24 (Implizite Mittelpu
- Seite 105 und 106:
Gegebeny k−1 ≈ y(t k−1 ),y k
- Seite 107 und 108:
Berechney 1 aus (1.4.30) & (1.4.31)
- Seite 109 und 110:
%f,\\alpha(0)=%f,p(0)=%f’,g,l,y0,
- Seite 111 und 112:
(1.4.27) angewandt auf (1.2.18) 5 4
- Seite 113 und 114:
10 9 Energies for Stoermer−Verlet
- Seite 115 und 116:
y/v v k+ 1/2 Numerische Mathemtik P
- Seite 117 und 118:
Numerische Mathemtik 2 Einschrittve
- Seite 119 und 120:
Numerische Mathemtik Baustein: Verf
- Seite 121 und 122:
Definition 2.1.5 (Explizite und imp
- Seite 123 und 124:
Beachte: Konvergenz gemäss Def. 2.
- Seite 125 und 126:
Definition 2.1.8 (Konsistenz einer
- Seite 127 und 128:
Interpretation: D Ψ t,t+h y τ(t,y
- Seite 129 und 130:
D(y) := x -> f(y(x)); D(y) := x ↦
- Seite 131 und 132:
Annahme: rechte Seitef : Ω ↦→
- Seite 133 und 134:
✬ ✩ Lemma 2.1.20 (Diskretes Gro
- Seite 135 und 136:
➁ Annahme A1:(y k ) N k=0 existie
- Seite 137 und 138:
Merkregel: (Nur) für Einschrittver
- Seite 139 und 140:
Fehlerrekursion e k = y(t k )−y k
- Seite 141 und 142:
Wir haben gesehen: Eine approximati
- Seite 143 und 144:
Der Beweis verwendet folgendes Hilf
- Seite 145 und 146:
✎ Notation: P s ˆ= Raum der univ
- Seite 147 und 148:
➤ (2.2.3) ˆ= (Nichtlineares) Gle
- Seite 149 und 150:
„Beweis” (von Lemma 2.2.7, unte
- Seite 151 und 152:
✎ Übliche Notation für Koeffizi
- Seite 153 und 154:
∥ ≤ |h|·‖A‖ ∞ max ∥f(g
- Seite 155 und 156:
Beweis auf der Grundlage des Satzes
- Seite 157 und 158:
Mit g y := (g y 1 ,...,gy s), g z :
- Seite 159 und 160:
Verschobene äquidistante Kollokati
- Seite 161:
• Falls = 1 & c 1 = 1/2 (↔ einf
- Seite 164 und 165:
△ Numerische Mathemtik Bekannt au
- Seite 166 und 167:
Bemerkung 2.2.25 (Fixpunktform von
- Seite 168 und 169:
mit KompaktumK ⊂ D, für das (rü
- Seite 170 und 171:
✬ ✩ Lemma 2.2.31 (Lipschitz-Ste
- Seite 172 und 173:
2.2.3 Konvergenz von Kollokationsve
- Seite 174 und 175:
Hilfsmittel beim Beweis: Restglieda
- Seite 176 und 177:
Aus der Lösungseigenschaft vont
- Seite 178 und 179:
10 0 h 1 Numerische Mathemtik y 0.8
- Seite 180 und 181:
Bsp. 2.2.49 legt die Vermutung nahe
- Seite 182 und 183:
Wegenẏ(t) = f(y(t)) folgt für di
- Seite 184 und 185:
Geniale Idee: Abschätzung von ∫
- Seite 186 und 187:
Dieses Beispiel studiert den Einsch
- Seite 188 und 189:
Polynominterpolationsfehlerabschät
- Seite 190 und 191:
1 f u n c t i o n errinf = gaussint
- Seite 192 und 193:
Interpolationsfehleranalyse mit Hil
- Seite 194 und 195:
✬ Lemma 2.2.62 (Residuenformel f
- Seite 196 und 197:
f(t) = − s∑ f(τ j ) j=1 P(t) (
- Seite 198 und 199:
Vermutung: |P n (t)| ≤ 1 für all
- Seite 200 und 201:
Dabei wurde im Sinne der komplexen
- Seite 202 und 203:
Wir betrachten nun die Joukowski-Tr
- Seite 204 und 205:
ρ n /10 10 5 10 4 10 3 10 2 10 1 1
- Seite 206 und 207:
Erinnerung: Formel von Cauchy-Hadam
- Seite 208 und 209:
✬ ✩ Theorem 2.2.81 (Fehlerabsch
- Seite 210 und 211:
Wenden wir ein Gauss-Kollokations-E
- Seite 212 und 213:
Im 0.8 0.6 0.4 0.2 0 y 0 = 10,λ =
- Seite 214 und 215:
λ = 5.5: Fehler zum Zeitpunkt T=1,
- Seite 216 und 217:
Füry 0 < 1: Pole in−1− 2 λ ln
- Seite 218 und 219:
400 350 300 y0=0.80111 λ=1 y0=0.80
- Seite 220 und 221:
λ = 10: Fehler zum Zeitpunkt T=1,
- Seite 222 und 223:
2.3 Runge-Kutta-Verfahren Numerisch
- Seite 224 und 225:
Definition 2.3.5 (Runge-Kutta-Verfa
- Seite 226 und 227:
Interpretation: Runge-Kutta-Verfahr
- Seite 228 und 229:
1 Numerische Mathemtik grün: Expli
- Seite 230 und 231:
Kuttas 3/8-Regel 1 Numerische Mathe
- Seite 232 und 233:
Bemerkung 2.3.15 (Autonomisierungsi
- Seite 234 und 235:
Bemerkung 2.3.18 (“Dense output
- Seite 236 und 237:
h „klein” ➣ Natürliche Anfan
- Seite 238 und 239:
1 0.9 0.8 0.7 y(t) Explicit Euler E
- Seite 240 und 241:
Konsistenzfehler: τ(t,y,h) := (Φ
- Seite 242 und 243:
k i =f(y 0 )+hDf(y 0 ) ⎛ 1 2 h 2
- Seite 244 und 245:
s∑ b i c i = 1 2 , (2.3.30) i=1 s
- Seite 246 und 247:
Numerische Mathemtik Bemerkung 2.3.
- Seite 248 und 249:
Ziel: vorgegebene Reduktion des Feh
- Seite 250 und 251:
(Annahme: Äquidistante Zeitschritt
- Seite 252 und 253:
2.4.2 Extrapolationsidee Numerische
- Seite 254 und 255:
Bemerkung 2.4.4 (Skalierungsinvaria
- Seite 256 und 257:
☞ Extrapolation „funktioniert
- Seite 258 und 259:
k∑ i=1 L i (0)h j i = ⎧ ⎪⎨
- Seite 260 und 261:
✬ ✩ Theorem 2.4.11 (Asymptotisc
- Seite 262 und 263:
Beweis von (2.4.15) durch Induktion
- Seite 264 und 265:
= y(t+h)−y(t)−hψ(t,y(t)+e(t)h
- Seite 266 und 267:
Fixiere Sequenz(n l ) k+1 l=1 ,n l
- Seite 268 und 269:
AWP für logistische Dgl. (→ Bsp.
- Seite 270 und 271:
wobeiC > 0 nur von den Verhältniss
- Seite 272 und 273:
MATLAB-CODE : Adaptives Euler-Extra
- Seite 274 und 275:
0.6 0.4 5 y (t ) (Naeherung) 1 k y
- Seite 276 und 277:
Beobachtung aus Bsp. 2.4.20 einfach
- Seite 278 und 279:
Bemerkung 2.4.23 (DIFEX). Numerisch
- Seite 280 und 281:
Φ t f y = 1 1+(y −1 −1)e−λt
- Seite 282 und 283:
Kutta-Inkremente in Bsp. 2.3.24, (2
- Seite 284 und 285:
( ) 0 Splitting: F(y) = + a(r) } {{
- Seite 286 und 287:
10 −2 Zeitschrittweite h |y(T)−
- Seite 288 und 289:
Gedankenexperiment: wie wird sich w
- Seite 290 und 291:
Concentration of HBrO 2 Fig. 89 4 3
- Seite 292 und 293:
Effizienz ✬ Ziel: N so klein wie
- Seite 294 und 295:
Ψ↔Explizites Euler-Verfahren (1.
- Seite 296 und 297:
3 while ((t(end) < T) (h > hmin)) %
- Seite 298 und 299:
! Gemäss unserer Heuristik, siehe
- Seite 300 und 301:
☞ Adaptive Zeitschrittweitensteue
- Seite 302 und 303:
Effizient ? Genaueres (teureres) Ve
- Seite 304 und 305:
Anfangswertproblem für skalare log
- Seite 306 und 307:
Beispiel 2.6.9 (“Versagen” adap
- Seite 308 und 309:
Beispiel 2.6.10 (Schrittweitensteue
- Seite 310 und 311:
Beispiel 2.6.12 (Schrittweitensteue
- Seite 312 und 313:
0 1 3 1 3 1 2 1 3 1 1 6 6 1 8 0 3 8
- Seite 314 und 315:
Beispiel 2.6.15 (Adaptive RK-ESV zu
- Seite 316 und 317:
4 3 abstol = 0.001000, reltol = 0.0
- Seite 318 und 319:
AWP aus Bsp. 2.4.19 ode45 mit versc
- Seite 320 und 321:
Numerische Mathemtik 3 Stabilität
- Seite 322 und 323:
Überlegung: Linearisierung um Fixp
- Seite 324 und 325:
Dies ist eine Frage nach Strukturer
- Seite 326 und 327:
Was sagt uns diese Stabilitätsfunk
- Seite 328 und 329:
✬ ✩ Korollar 3.1.8. ✫ Explizi
- Seite 330 und 331:
Dieses hat nur die triviale Lösung
- Seite 332 und 333:
60 50 40 30 exp(z) Explicit Euler C
- Seite 334 und 335: 3 2 * λ Stabilitätsbedingte Schri
- Seite 336 und 337: Hilfsmittel: Schur-Zerlegung Numeri
- Seite 338 und 339: Klar ist p(A) = s∑ c j A j ∑ f
- Seite 340 und 341: Die Begriffsbildung ist klar: eine
- Seite 342 und 343: ✬ ✩ Theorem 3.2.4 (Hinreichende
- Seite 344 und 345: Linearisierung, siehe Bem. 1.3.19:
- Seite 346 und 347: Wir betrachten weiterhin ein autono
- Seite 348 und 349: ✬ Numerische Mathemtik ✩ Lemma
- Seite 350 und 351: Für welche Verfahren entfällt Sch
- Seite 352 und 353: 3 2 implizite Mittelpunktsregel (1.
- Seite 354 und 355: Erinnerung: Eine AbbildungV : R d
- Seite 356 und 357: Nichtexpansivität einer Evolution:
- Seite 358 und 359: Aus Kollokationsbedingungen (2.2.1)
- Seite 360 und 361: 0.9 0.9 1 1 1 △ Numerische Mathem
- Seite 362 und 363: { −y 3 füry < 0 , angewandt auf
- Seite 364 und 365: ODE mit stark attraktivem Fixpunkty
- Seite 366 und 367: ➣ Ungenügende Dämpfung der Anfa
- Seite 368 und 369: Bemerkung 3.4.6 (Invertierbarkeit d
- Seite 370 und 371: order of quadrature rule 23 21 19 1
- Seite 372 und 373: 1.5 1.5 0.7 0.4 10 20 30 8 6 4 2 0.
- Seite 374 und 375: ✬ ✩ Theorem 3.4.8 (Radau-ESV ni
- Seite 376 und 377: Beispiel 3.5.2 (Adaptive explizite
- Seite 378 und 379: Fallsc A (0) > c B (0) ➢ 2. Reakt
- Seite 380 und 381: Schaltkreisanalyse im Zeitbereich:
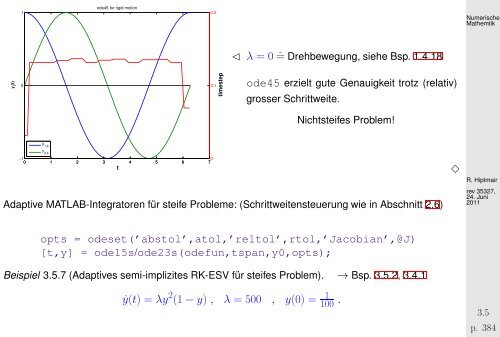
- Seite 382 und 383: ☞ Falls‖y 0 ‖ = 1 ⇒‖y(t)
- Seite 386 und 387: 3.6 Linear-implizite Runge-Kutta-Ve
- Seite 388 und 389: Logistic ODE, y 0 = 0.100000, λ =
- Seite 390 und 391: 2-stufiges Radau-ESV, Butcher Schem
- Seite 392 und 393: Ein Newton-Schritt mit Startwertk (
- Seite 394 und 395: (3.6.9) ⇒ y 1 = y 0 +h ( ∑ s )
- Seite 396 und 397: 3.7 Exponentielle Integratoren [24,
- Seite 398 und 399: exponentielles Euler-Verfahren (auf
- Seite 400 und 401: • Steifes AWP → Bsp. 3.5.2, 3.4
- Seite 402 und 403: Bemerkung 3.7.8. Herausforderung: e
- Seite 404 und 405: Numerische Mathemtik Beachte: ( 1 0
- Seite 406 und 407: In Bsp. 3.8.1: Transformationen ➣
- Seite 408 und 409: Definition 3.8.7 (DAE vom Index 1).
- Seite 410 und 411: ( ) C+Cp −C )(˙u1 −C C ˙u2 =
- Seite 412 und 413: Formale Rechnung: Singuläre Störu
- Seite 414 und 415: ⇒ v 1 = g v s ⇒ c(u 1 ,v 1 ) =
- Seite 416 und 417: Erwünscht: S(−∞) = 0 für Stab
- Seite 418 und 419: MATLAB-CODE : Lösung einer Index-1
- Seite 420 und 421: x 2 0 x 1 Mathematisches Pendel (Au
- Seite 422 und 423: Bemerkung 3.8.23 (Hamiltonsche Bewe
- Seite 424 und 425: FürH der Form (3.8.25): ∂ 2 H
- Seite 426 und 427: ✸ Numerische Mathemtik Beispiel 3
- Seite 428 und 429: Man beobachtet algebraische Konverg
- Seite 430 und 431: ➣ Stufengleichungen (→ Bem. 2.3
- Seite 432 und 433: △ Numerische Mathemtik Konvergenz
- Seite 434 und 435:
Beachte: In diesem Kapitel beschrä
- Seite 436 und 437:
Beweis. (für den autonomen Fall) L
- Seite 438 und 439:
➣ Keine Erhaltung von‖y(t)‖
- Seite 440 und 441:
y h (t) ∈ P s ˆ= Gauss-Kollokati
- Seite 442 und 443:
g i = y 0 +h s ∑ j=1 a ij f(g j )
- Seite 444 und 445:
☞ Bekannt aus der linearen Algebr
- Seite 446 und 447:
S(A) = diag(S(µ),S(ν),S(−(µ+ν
- Seite 448 und 449:
Beweis. (basierend auf Lemma 4.2.2,
- Seite 450 und 451:
Volumenerhaltende numerische ODE-L
- Seite 452 und 453:
so gilt detW(t) ≡ 1, also is detW
- Seite 454 und 455:
⎛ ⎞ f 1 (y) f 2 (y) f 3 (y) f(y
- Seite 456 und 457:
4.3 Verallgemeinerte Reversibilitä
- Seite 458 und 459:
⇒ ⎧ s∑ k ⎪⎨ i = f(y 0 +h
- Seite 460 und 461:
Numerische Mathemtik Nachtrag zu Se
- Seite 462 und 463:
Annahme: Für alley 0 ∈ D existie
- Seite 464 und 465:
Alternative Perspektive: Hamiltonsc
- Seite 466 und 467:
➁ direkte Verifikation von Def. 4
- Seite 468 und 469:
q 9 8 7 6 5 4 (p(t),q(t)) RK4 Metho
- Seite 470 und 471:
11 10 9 t=0 t=0.5 t=1 t=2 t=3 t=5 N
- Seite 472 und 473:
Verallgemeinerung auf höhere Dimen
- Seite 474 und 475:
Beweis. L = −L T ⇒ unitär diag
- Seite 476 und 477:
Istψ : U ↦→ R d eine Parametri
- Seite 478 und 479:
✎ Notation: ∇ 2 H ˆ= (symmetri
- Seite 480 und 481:
Einschrittverfahren fürẏ = f(y)
- Seite 482 und 483:
Beweis (von Thm. 4.4.15) Numerische
- Seite 484 und 485:
Bemerkung 4.4.19 (Einfache symplekt
- Seite 486 und 487:
✬ ✩ Theorem 4.4.23 (Symplektisc
- Seite 488 und 489:
(4.4.26) = explizite symplektische
- Seite 490 und 491:
in Stufenform, vgl. Bem. 2.3.7: ⎧
- Seite 492 und 493:
11 10 9 t=0 t=0.5 t=1 t=2 t=3 t=5 1
- Seite 494 und 495:
Symplektische ESV: Symplektisches p
- Seite 496 und 497:
1 0.5 Stoermer−Verlet, h = 0.2000
- Seite 498 und 499:
➥ Hamiltonsche Differentialgleich
- Seite 500 und 501:
100 Trajektorien der Atome, Verlet,
- Seite 502 und 503:
2D konservatives Vielteilchensystem
- Seite 504 und 505:
1.4 1.2 Stoermer−Verlet: 10 x 10
- Seite 506 und 507:
5 Stoermer−Verlet Explicit TR Pro
- Seite 508 und 509:
Konkrete Anwendung dieser Philosoph
- Seite 510 und 511:
? Modifizierte Gleichung im allgeme
- Seite 512 und 513:
Durchwegs “stillschweigende Annah
- Seite 514 und 515:
➣ Beobachtung: Taylorentwicklung
- Seite 516 und 517:
Explizites Euler-Verfahren (1.4.2):
- Seite 518 und 519:
Explicit Euler h=0.050000, logistic
- Seite 520 und 521:
Im Sinne der Rückwärtsanalyse (
- Seite 522 und 523:
JEDOCH: γ = 1, L = 1 Numerische Ma
- Seite 524 und 525:
Wir sind frei in der Wahl der Absch
- Seite 526 und 527:
✬ ✩ Theorem 4.4.66 (Konsistenzf
- Seite 528 und 529:
Ziel, vgl. (4.4.67): Abschätzung d
- Seite 530 und 531:
Wir haben nun gesehen, wie man unte
- Seite 532 und 533:
Idee: „∀α” in (4.4.73) ➣ n
- Seite 534 und 535:
Wir sind „frei” in der Wahl von
- Seite 536 und 537:
Dann weiter wie zuvor skizziert, si
- Seite 538 und 539:
10 0 1/C 2 h 10 −2 40 35 Numerisc
- Seite 540 und 541:
✎ Notationen: ỹ ˆ= Lösung des
- Seite 542 und 543:
✬ ✩ Lemma 4.4.83 (Störungsabsc
- Seite 544 und 545:
Also: |˜f h,l (y)−f(y)| ≤ Ch f
- Seite 546 und 547:
➀ Explizites Euler-Verfahren für
- Seite 548 und 549:
Konkret: mathematisches Pendel →
- Seite 550 und 551:
✬ ✩ Theorem 4.4.88 (Symplektizi
- Seite 552 und 553:
Erklärung der “Langzeitenergieer
- Seite 554 und 555:
✬ ✩ Theorem 4.4.91 (Langzeitene
- Seite 556 und 557:
4.5 Methoden für oszillatorische D
- Seite 558 und 559:
ω ↑ ⇒ Oszillationen iny(t) ↑
- Seite 560 und 561:
1.5 1 Gautschi−Verfahren: h = 0.1
- Seite 562 und 563:
10 1 Gautschi−Verfahren: Konverge
- Seite 564 und 565:
15 Gautschi−Verfahren: Konvergenz
- Seite 566 und 567:
1 0.8 Numerische Mathemtik sinc(x)
- Seite 568 und 569:
0.14 0.12 Filterndes Gautschi−Ver
- Seite 570 und 571:
Numerische Mathemtik Verzeichnisse
- Seite 572 und 573:
Newtonsche, 37 bimolekulare Reaktio
- Seite 574 und 575:
Gauss-Radau-Quadratur, 369 Gaussqua
- Seite 576 und 577:
lokale, 46 Logistische Differential
- Seite 578 und 579:
Runge-Kutta 3/8-Regel, 230 Affin-Ko
- Seite 580 und 581:
Zwangskraft, 420 Zweischrittverfahr
- Seite 582 und 583:
Einfache reversible Einschrittverfa
- Seite 584 und 585:
Schrittweitensteuerung für explizi
- Seite 586 und 587:
Stetiger linearer Operator, 164 Sym
- Seite 588 und 589:
Numerische Mathemtik Notationen C l
- Seite 590 und 591:
• Beispiel 1.4.15 • Beispiel 1.
- Seite 592 und 593:
• Beispiel 3.7.6 • Beispiel 3.8
- Seite 594 und 595:
[8] P. DEUFLHARD AND F. BORNEMANN,
- Seite 596:
[27] E. LORENZ, Deterministic non-p